发布时间:2012-12-10 阅读量:1238 来源: 我爱方案网 作者:
.jpg)
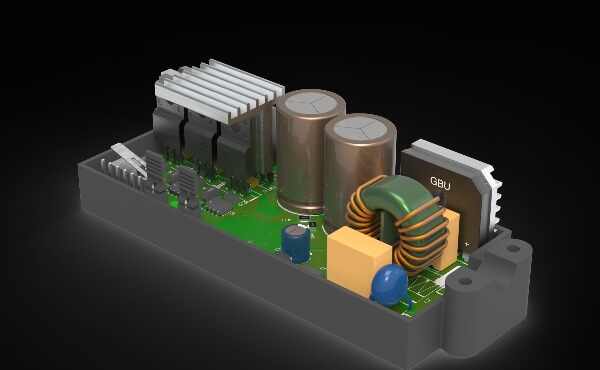
图1 MB39C602系列芯片应用框图
技术规范和特性
.png)
.png)
|
项目 |
MB39C602 |
|
SW 模式 |
峰值电流运行/持续通电运行 |
|
SW FET |
外部 |
|
结温 |
Tjmax=125 °C |
|
环境温度 |
Ta=-40°至+85°C |
|
SW频率 |
30kHz-130kHz(最大值) |
|
保护 |
LED开启检测,过流保护,过压保护,过温保护 |
|
封装 |
SOP-8 |

本文将深度剖析电源设计中最常见的7个“坑”,帮助工程师规避风险,提高产品可靠性与性能
通常一个完整的人形机器人需要20~40个关节自由度,这些关节的驱动方式直接决定了机器人的灵活性、能耗、响应速度和负载能力
本文将详细介绍汽车电子与工业电子的核心差异
本文将深入剖析微型逆变器和传统逆变器的核心技术差异以及它们在不同应用场景中的优劣。
未来的人形机器人需要在端侧运行更复杂的AI模型,这要求MCU不仅要有强大的通用处理能力,还需要集成专用的NPU或DSP高效运行AI推理任务。



