发布时间:2014-04-25 阅读量:4504 来源: 我爱方案网 作者:
老牌高清播放器厂商海美迪目前产品线也以Android智能网络电视盒为主,近期则推出了一系列与“芒果台”湖南卫视合作的主题产品“芒果嗨Q”,其中H7配置了全志A31S四核Cortex-A7处理器,1GB内存和8GB内置存储空间,有3个标准USB2.0接口及支持SDHC存储卡扩展,还支持标准的AV视频模拟输出,方便用于老型号CRT彩电,基于Android 4.2系统。
拆解前先看一下外观展示:


HDMI数据线

电源适配器

遥控器



USB2.0接口

USB接口和SDHC存储卡扩展

光纤SPDIF、模拟AV、RJ45有线网络接口

HDMI、电源接口

局部

拆开底盖

接口

瑞昱RTL8188无线网络控制器

GENESYS GL8506 USB控制器
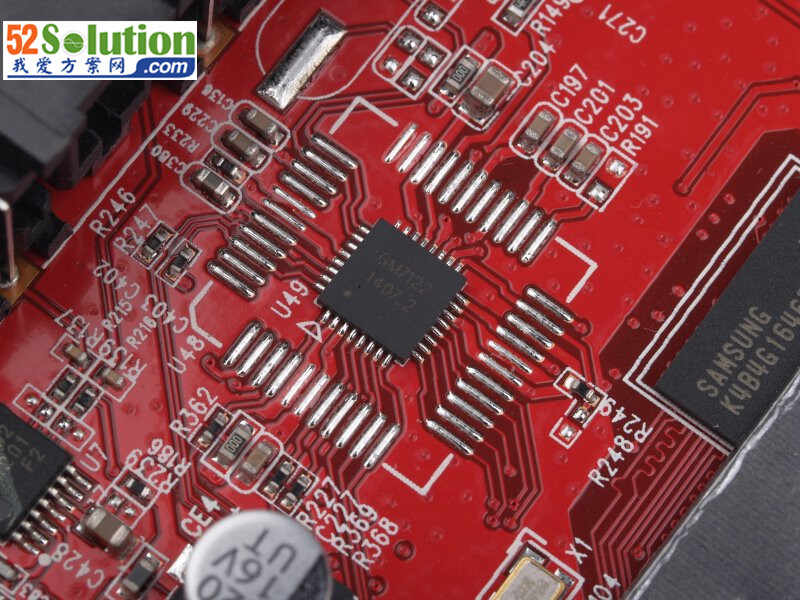
国腾GM7122 CVBS视频编码IC
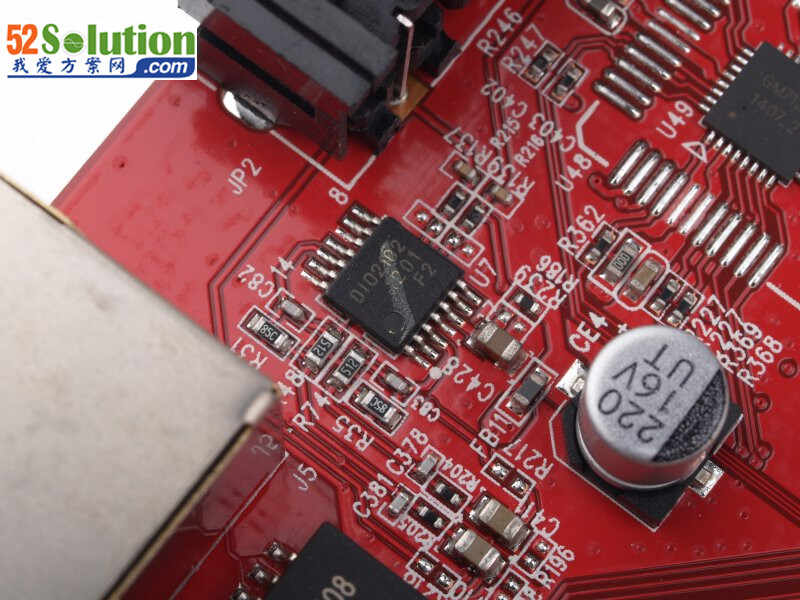
帝奥微DIO2102运放IC

九阳电子IP101GA有线以太网IC

X-Powers AXP221S电源管理IC

全志A31S处理器
以前一直神神秘秘的CPU到底是何方神圣,这时就真相大白了,它就是全志A31S:作为全志四核移动应用处理器A31的cost down 版本, A31s新增加了对各种无线数据传输技术如3G, 2G, LTE, WIFI, BT, FM, GPS, AGPS等的支持。
A31s处理器具有以下特性:
四核Cortex-A7 CPU架构;
配备PowerVR SGX544MP2 GPU, 拥有8颗渲染引擎
集成HawkView摄像头ISP,支持高清图像处理和快速图像捕捉
专为多核CPU设计的低功耗PMU AXP221s
集成Audio编解码模块,支持多个MIC接口,采用全志专有的CrispTalk消噪技术

Foresee[江波龙] NCTSTS76 NAND存储IC

三星DDR2内存

最后附上一张芒果嗨Q H7的广告图,是不是有种似曾相识的感觉啊!

印度政府已下令禁止从中国进口所谓的“敏感技术设备”,并着手替换已在使用的中国大陆产摄像头
三星电子与SK海力士分别与德国林德公司(Linde)、美国空气产品公司(Air Products)签署长期额外氦气供应合同

欣旺达旗下子公司欣旺达动力已正式通过验证,成为特斯拉全球第五家动力电池供应商
我爱方案网推荐Digi International (Digi) 新款Digi Connect® Sensor XRT-M电池供电LTE-M蜂窝网关方案

在上一篇技术实践中,我们基于米尔RK3576核心板与ROS2 Humble框架,成功实现了机器人利用SLAM Toolbox与Nav2进行自主建图与导航,解决了“机器人如何走到哪里”的基础移动问题。还要“看到并操作”——识别特定物体、主动跟随、近距离抓取。本文将在此基础上,集成深度摄像头,实现机器人核心功能。我们将重点利用RK3576内置的6TOPS NPU算力,部署高性能的MixFormerV2目标跟踪算法,以替代传统鲁棒性差的OpenCV方法,进而实现对特定目标的精准识别、底盘动态跟随以及最终的机械臂自主抓取,完成“识别-跟随-抓取”这一复杂任务链。



