发布时间:2016-01-14 阅读量:945 来源: 我爱方案网 作者:
这个制作涵盖了制作月球车的所有步骤,具体包括:STL文件的构建,各种部件的连接,控制系统和编程方面。对新手来讲,这绝对是一次很棒的学习机会。在DIY过程中请注意:这个项目有很多繁复的焊接、收缩线、打包连接器的工作,并且,连续旋转伺服系统的保养过程需要非常谨慎,稍不小心,就容易毁掉一个伺服。
Step 1: 元件及所需工具
电子元件:
· Arduino Uno开发板 (1个)
· DROC 稳压器(1个)
· Hobbymate 无刷电机(1个)
· 1300 mAh 锂电池(1个)
· 线路板(1个)
· T型连接器(5个)
· 5/16“木销(1个)
· 红外接收器(1个)
· 红外遥控发射器(1个)
· 开关(1个)
· 伺服扩展器(8个)
· MG90S 舵机(9个)
· HC SR04 超声波传感器(1个)
· 红色LED灯(1个)
· 绿色LED灯(1个)
· 22KΩ电阻(8个)
· 220Ω电阻(2个)
· 螺栓(2个)
· 尼龙锁紧螺母(2个)
· #2 螺丝(6颗)
· 曲别针(4个)
· Ream of Wire Loom
工具:
· 电烙铁
· 药芯焊
· 剪线器
· 钢丝钳
· 小十字螺丝刀
· 小型梅花螺丝刀
其他物件:
· 胶
· 模型漆
· 贴花
· 铝箔
· 涂胶的黑色喷漆
为了使电机连续正常运转,需要保养电机,相关视频可以在网上找到。
Step 2: 3D打印的部件和组装
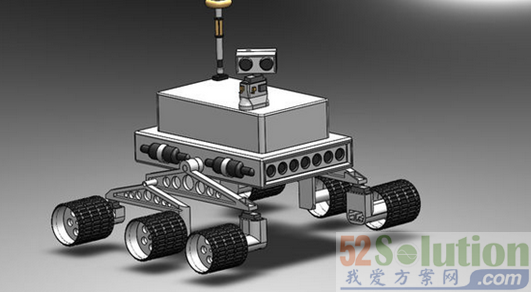

这个模型大多数的零件都可以直接用3D打印机打印。在这之前,已经完成STL文件的模型重建。四个改性连续旋转舵机将需要被安装在驱动轮和驱动器外壳,轮毂的中心组能自由旋转,黑线环被用于隐藏从驱动器外壳翘出的电线,弯曲的系住后驱壳。5/16“木销钉被切成不同尺寸,用来连接主双臂向中央差速器系统。施加到车轮的橡胶漆,是为了增加外表面的牵引力。在可忍受的误差范围内,为保证系统正常运转,也许还需要一些额外的工具。该装配过程是非常简单的,可以从那些3D爆炸图片剥离出来。为使整体美观,可以买某些型号的油漆涂刷和一点点铝箔来隐藏导线。

Step 3:控制系统

控制系统是在1300mA的锂聚合物电池的支持下开始运转的。此电池对于整个系统来说是不可或缺的一部分,虽然当初买它只是出于买备用电池的目的。当电源电压被送至可调电压调节器,原本被设定到大约6.71v被调至约5.08v,通过arduino可以达到5V左右。但是,因为连续的伺服系统接收的是6.71v电压源,非5v来源,因此不能正常运转。但经过电压调节器调至5.08V则解决了这个问题,因此,经过电压调节器后,电压被送至Arduino和其他元件。红外接收器、LED、超声波传感器都安装在了舵机的外部。为便于罗夫的元器件合适的与电源、接地端相连,最好先焊接好两排元器件。您将需要焊接两行后对PCB板,以分发所有的电源和接地连接器,用于月球车的各个组成部分。
Step 4: 电路图

上图是这个作品原理图各元件及导线的具体分布,每个元件都被分配到合理的电压,以及从Arduino板发送出去的信号。为便于轻松地断开系统部件进行更换或在其他项目中使用,可以使用T-连接器。在这个图中,仅仅表明了各元器件如何连接的,其引脚配置与Arduino的草图不一致,在实际制作中请参考Arduino草图进行适当的引脚配置。
Step 5: Arduino的草图
需要注意的是,为连续旋转伺服的停止位置设置的值需要不时的改变,因为在伺服上被用于分散电压的通用电阻准确性不高,不是每一个都会得出相同的值。例如,某人的伺服的停止位置是在89,88,66,69度,从理论上讲,该停止位置应在90度,但是,如前面所提到的,用于该项目的通用电阻并不十分精确。还需要指出的是,任何红外遥控可以用于此项目。但是,需要指出的是,遥控通用按钮的值会和Arduino草图上的值不一样。YouTube上有如何找到你的红外遥控按钮的值相关的视频。
Step 6:最终成品及组装
当前按钮按下,舵机会继续向前直到停止键被按下。当转向键被按下,转向舵机开始工作,轮子会驱动舵机向意愿方向转动。如果舵机距离目标物体太近,红色LED灯会闪烁并会启动蜂鸣器。要停止使用,只需按下停用按钮和主单元,将不再检测和感应在其确定的附近的对象。
相关阅读:

近日,日产汽车和总部位于英国的自动驾驶初创公司Wayve签署协议,合作开发基于人工智能的驾驶辅助系统。

京东开启招聘存算一体芯片设计工程师计划,薪酬高达“40K-100K*20薪”

日本芯片制造商铠侠(Kioxia)计划于2026年在其岩手县晶圆厂开始生产新一代NAND闪存芯片。

一系列诉讼指控芯片制造商英特尔、AMD及德州仪器公司,未能有效阻止其技术被用于俄罗斯制造的武器。

台积电日本子公司JASM熊本第二晶圆厂在 10 月下旬启动后近期处于暂停状态,重型设备已撤出工地



