发布时间:2017-02-21 阅读量:4585 来源: 我爱方案网 作者: jiangliu
1.从旧货摊买的两个硬盘

2.费了九牛二虎之力,最后改造一个拆手机用的起子,搞定

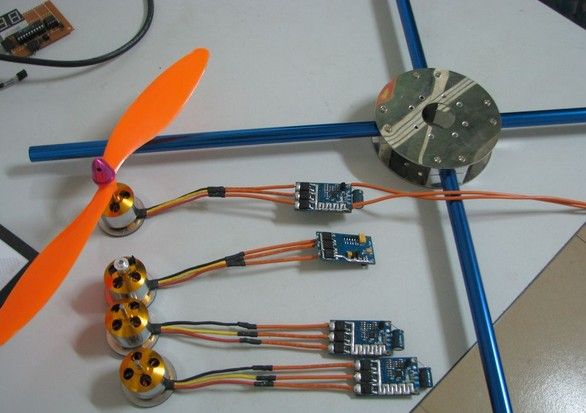
下面接着来。机架打算用现有的电直尾管和管座配上硬盘片构成,电机用新西达2212 KV930,两正两反的桨用口碑不错的德国EPP1045 。
3.固定电直尾管的座子,好贵呀。

4.和到手的电机、尾管合张照

5.外加工的4个电机安装座

6.机体主要部分完成
7.加工机架的得力工具,桌面微型台钻

8.EPP1045

9.一正一反

10.和市场上3块钱一个的正桨对比

11.用电机原配的桨保护器固定两叶桨

12.焊上香蕉头,感觉重量不小,拆除前留个影

13.电机安装固定方式
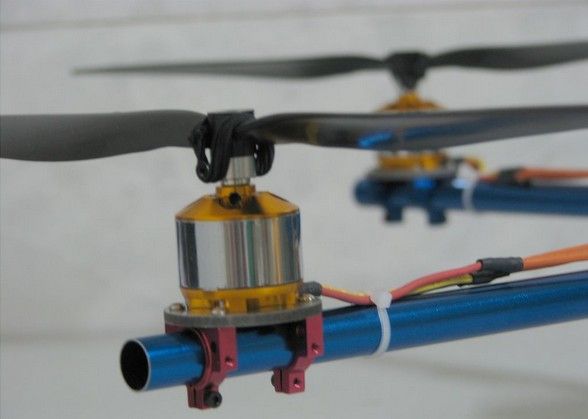
14.机架整体结构

15.平视角度,很有型吧

16.整机完成效果图

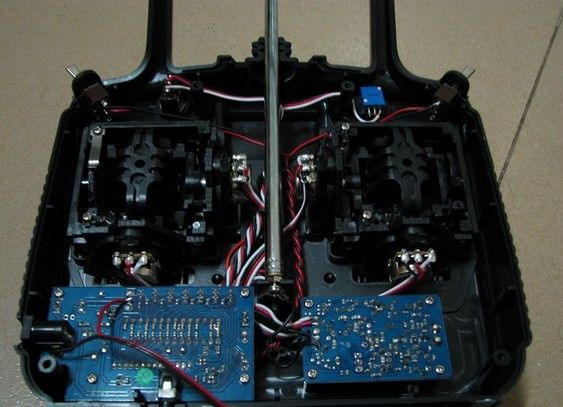
好了,机架完成了。接下来是遥控器的改造时间 , 买了个又便宜又大块的FT06-C, 准备先把6通改到8通,增加两个比例通道,并且配上LCD液晶屏,用来显示控的相关参数。控的高频头还留用,PPM编码板整个换掉它。
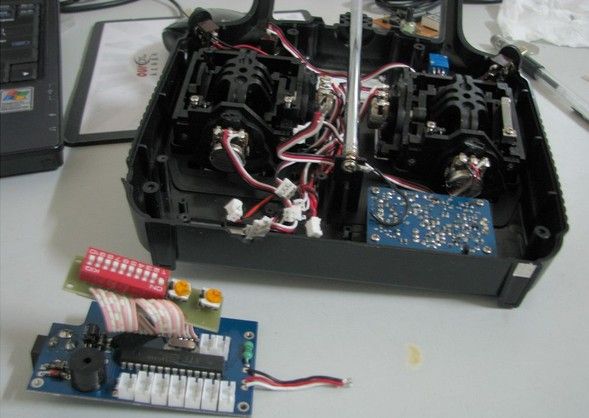
17.准备拿来折腾的天地飞6C控

18.FT06-C内部结构
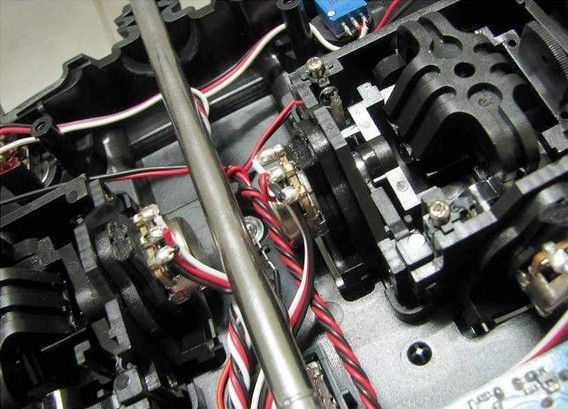
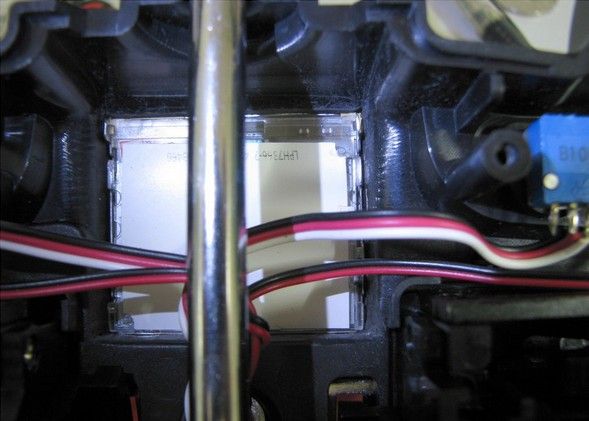
19.在这个位置加个LCD屏
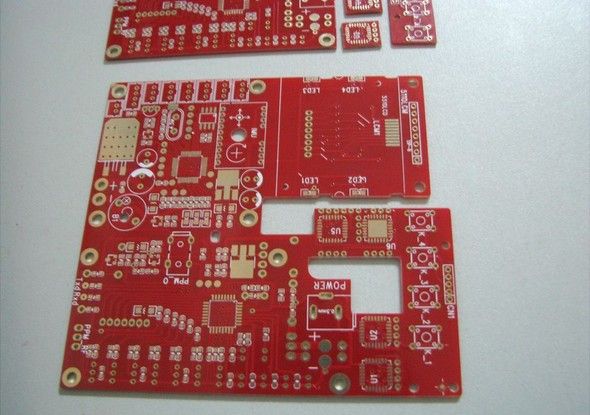
20.打回来的样板,这样做省¥¥
21.为裁板专门买的勾刀

22.花了一个多小时时间,搞定!

23.拆掉FT06-C控的原装PPM板
24.比下位置,很正点

25.FT06-C的这个位置,刚好能放进一个5110屏
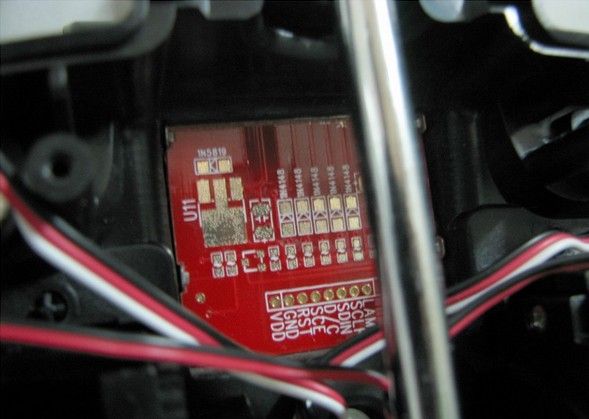
26.液晶屏的PCB板
27.预期效果

28.PPM控制板焊接完工

29.看背面。底部电源走线,被工厂做板时移错了位置

30.新到手的5110LCD屏

31.布线时未注意,搞反了液晶的方向

32.液晶屏点亮成功

33.效果怎样

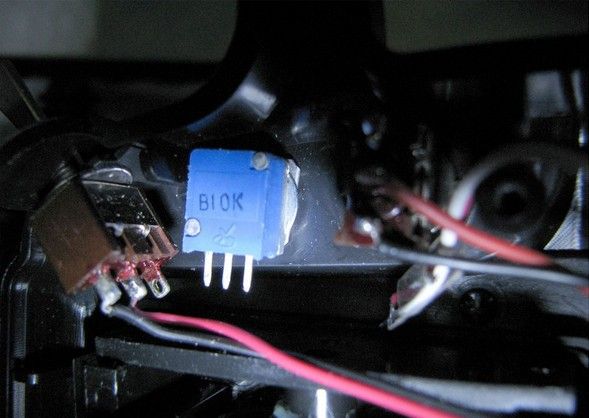
34.安装右边电位器
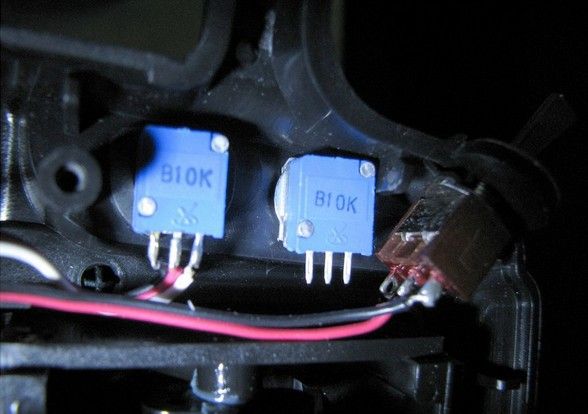
35.右边

36.安装左边电位器
37.左边

38.液晶、电位器的连线
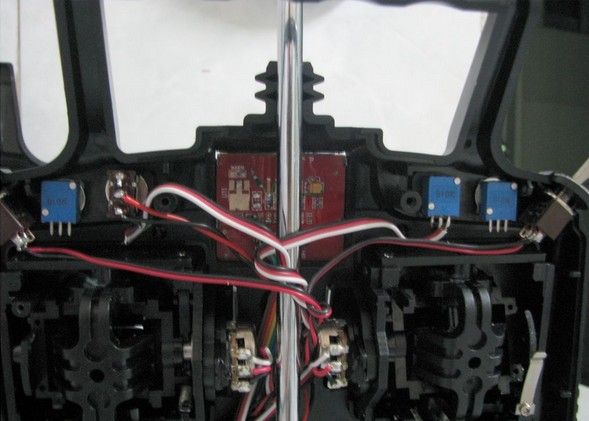
39.增加的两个电位器

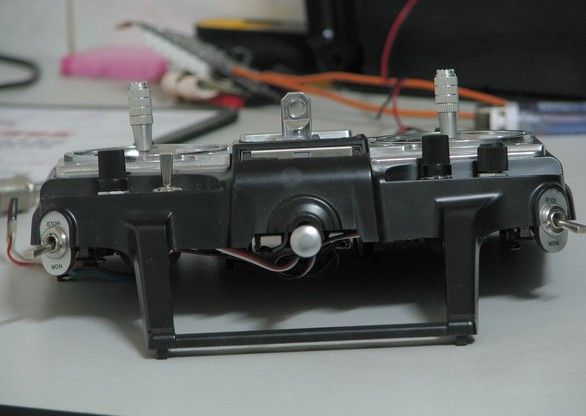
40.旋钮安装好的样子

41.增加的电位器旋钮高度
42.工程模式,校准摇杆中立点

43.工作时,显示前6个通道的PPM有效值

44.从接收机输出测得的8通道PPM波形

再来个控的最新图片,通道数到目前为止还是够用就好,没去动它。根据PPM的信号格式,最多是可以做到12个通道的,一般的应用也不需要这么多,等确定需要的时候,再说吧,控的改造先到这里了。
46.控的最新效果

至此,无人机的全部制作过程已经完成了。由于水平所限,只熟悉和使用51架构的MCU,系统的所有模块都是架构在C8051F($8.5976)的基础上。但四轴所涉及的原理、控制理论都是一样的原理,如果有更好的建议,希望各位童鞋不吝赐教,相互交流,共同进步!!!

近日,日产汽车和总部位于英国的自动驾驶初创公司Wayve签署协议,合作开发基于人工智能的驾驶辅助系统。

京东开启招聘存算一体芯片设计工程师计划,薪酬高达“40K-100K*20薪”

日本芯片制造商铠侠(Kioxia)计划于2026年在其岩手县晶圆厂开始生产新一代NAND闪存芯片。

一系列诉讼指控芯片制造商英特尔、AMD及德州仪器公司,未能有效阻止其技术被用于俄罗斯制造的武器。

台积电日本子公司JASM熊本第二晶圆厂在 10 月下旬启动后近期处于暂停状态,重型设备已撤出工地



