发布时间:2017-05-16 阅读量:949 来源: 我爱方案网 作者:
近年来,行车安全与智能驾驶受到世界各国的普遍重视,26G频段(24.25~ 26.65GHz)的车载UWB短距雷达(Short Range Radar,SRR)是实现这一目标的关键技术组成。但根据国际电联的相关规定,该频段已划分给固定业务、EESS/SRS空对地等业务,另外还有邻频的射电天文业务和EESS无源业务。
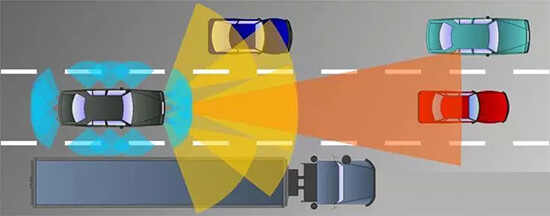
图1:24GHz-27GHz频段引入超宽带车载短距雷达系统
4)计算不同环境下车载雷达对固定业务的同频干扰,确定系统间的保护距离。
以上就是小编为大家介绍的有关“24GHz-27GHz频段引入超宽带车载短距雷达系统”的相关知识,有想了解更多的朋友可以看以下相关文章。希望通过小编的介绍能给大家带来帮助!
浏览过(24GHz-27GHz频段引入超宽带车载短距雷达系统)的浏览了:
24GHz车载短距雷达频段确定-原文链接:
http://www.52solution.com/knowledge/5485.html

无源晶振与有源晶振是电子系统中两种根本性的时钟元件,其核心区别在于是否内置振荡电路。晶振结构上的本质差异,直接决定了两者在应用场景、设计复杂度和成本上的不同。

RTC(实时时钟)电路广泛采用音叉型32.768kHz晶振作为时基源,但其频率稳定性对温度变化极为敏感。温度偏离常温基准(通常为25℃)时,频率会产生显著漂移,且偏离越远漂移越大。

有源晶振作为晶振的核心类别,凭借其内部集成振荡电路的独特设计,无需依赖外部电路即可独立工作,在电子设备中扮演着关键角色。本文将系统解析有源晶振的核心参数、电路设计及引脚接法,重点阐述其频率稳定度、老化率等关键指标,并结合实际电路图与引脚定义,帮助大家全面掌握有源晶振的应用要点,避免因接线错误导致器件失效。

晶振老化是影响其长期频率稳定性的核心因素,主要表现为输出频率随时间的缓慢漂移。无论是晶体谐振器还是晶体振荡器,在生产过程中均需经过针对性的防老化处理,但二者的工艺路径与耗时存在显著差异。

在现代汽车行业中,HUD平视显示系统正日益成为驾驶员的得力助手,为驾驶员提供实时导航、车辆信息和警示等功能,使驾驶更加安全和便捷。在HUD平视显示系统中,高精度的晶振是确保系统稳定运行的关键要素。YSX321SL是一款优质的3225无源晶振,拥有多项卓越特性,使其成为HUD平视显示系统的首选。



