发布时间:2020-08-4 阅读量:1302 来源: 机器之心 发布人: CiCi
自拍也能变为他拍,魔幻修图界又出新招式,但效果实在感人。
智能手机的出现,让摄影变成了一项大众艺术,也让越来越多的人爱上「自拍」。但自拍照常常存在构图问题,比如不自然的肩膀姿势、占据一小半镜头的手臂,或者极其诡异的视角。

要想解决这个问题,可以选择随身携带三脚架或自拍杆,也可以选择随身携带一个朋友作为摄影师(该方法对单身狗极其不友好)。
或者,你还可以选择相信后期修图的艺术。近日,来自 Adobe 研究院、UC 伯克利、鲁汶大学的研究者开发了一种「自拍」变「他拍」的新技术,通过识别目标的姿势并生成身体的纹理,在给定的自拍背景中完善和合成人物。(论文链接:https://arxiv.org/pdf/2007.15068.pdf)
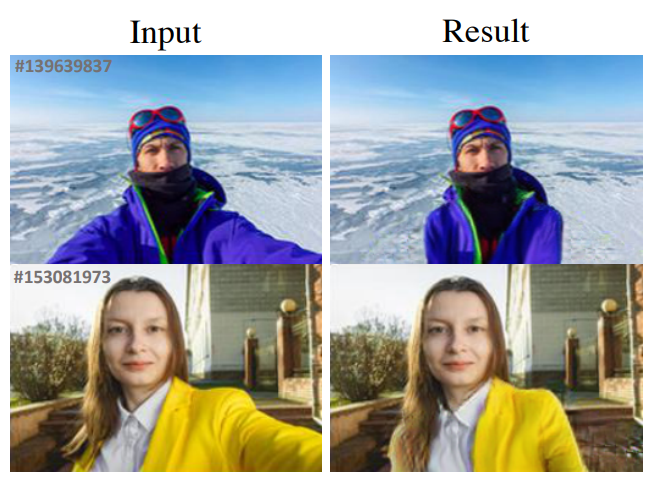
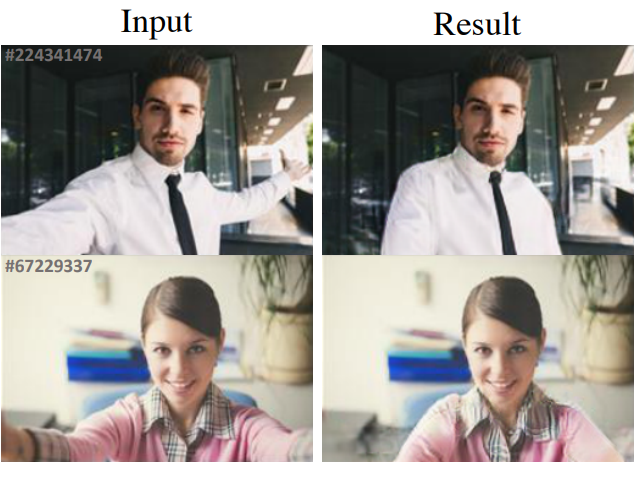
在这篇论文中,研究者提出了一种叫做 「Unselfie(非自拍)」的图片转换方法,能够将自拍照中的人物,转变为手臂、肩膀、躯干都比较放松舒展的“他拍图像”。它会把所有举起的手臂调整为向下,然后调整服装细节,最后填充好所有暴露出来的背景区域。
除了用来修饰社交媒体上的自拍照,这项技术还有很多应用方式,如果你急需一张证件照,而无人能帮你拍摄,那这项技术就能派上用场。
当然,这个方法目前还不太成熟,除了效果一般之外,偶尔还有翻车的时候,比如生成这样的图像:

「自拍」转「他拍」的三大挑战
总的来说,「自拍」转「他拍」存在三大挑战:
没有成对的训练数据(自拍 - 他拍图像对);
一个自拍姿势可能对应多个他拍姿势;
改变姿势会在背景中留下空洞,因此在转换过程中要填补这些空洞。
研究者尝试用之前的几种方法来解决挑战,但实验结果表明,这些方法会产生明显的伪影,其纹理细节也会由于外观信息的高度压缩而丢失。
因此,他们提出借助合成「自拍 - 他拍」图像对和自监督学习的方法来解决上述问题。
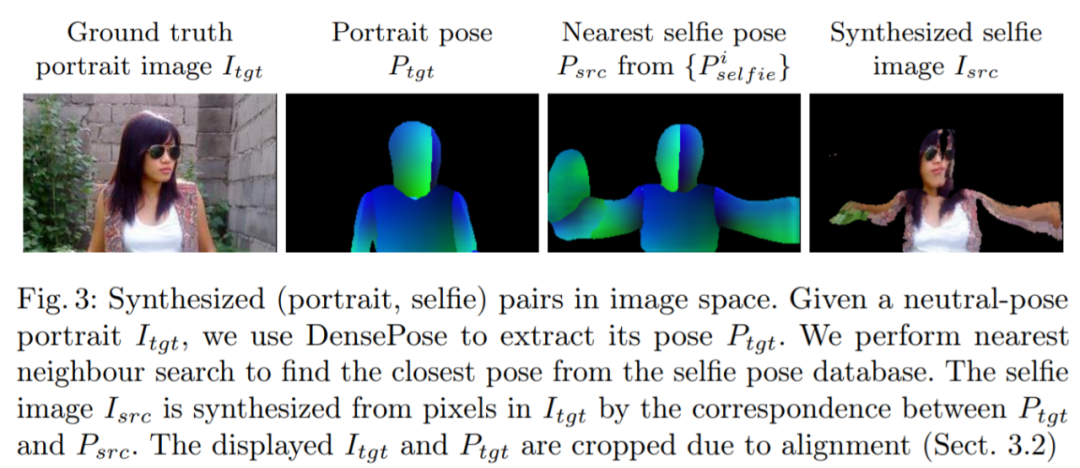
具体来说,研究者提出了一种利用他拍图像合成对应自拍图像的方法,他们利用非参数化最近姿态搜索模块来检索最接近给定他拍图像的自拍图像,然后合成对应的自拍照。他们还在推理过程中应用了一个最近姿态搜索模块。给定一个自拍姿态输入,模型会检索出与之匹配度最高的他拍姿态,然后利用这个姿态来合成最后的他拍效果。合成的输出的结果不止一个,用户可以从中选择,这就解决了上面提到的挑战 2。
利用上述步骤合成的成对数据可以直接用来训练一个有监督的人像生成网络,但实验结果显示,明显的伪影问题依然没有解决。之前的各种方法对于合成的成对训练数据与真实自拍测试数据之间的像素级 domain gap 非常敏感(如下图 3 所示)。
受到 CVPR 2019 论文《Coordinate-based texture inpainting for pose-guided image generation》的启发,研究者使用基于坐标的修补方法在 UV 空间中修补身体纹理,空间中大部分是不变的原始身体姿态,因此在面临合成数据的瑕疵时更具鲁棒性。此外,基于坐标的修补方法可以重新利用可见像素,从而获得更清晰的结果。
为了应对挑战 3,研究者使用了一个基于合成网络的门控卷积层来完善身体外观和填补背景空白,并保持人体与背景之间的平滑过渡。
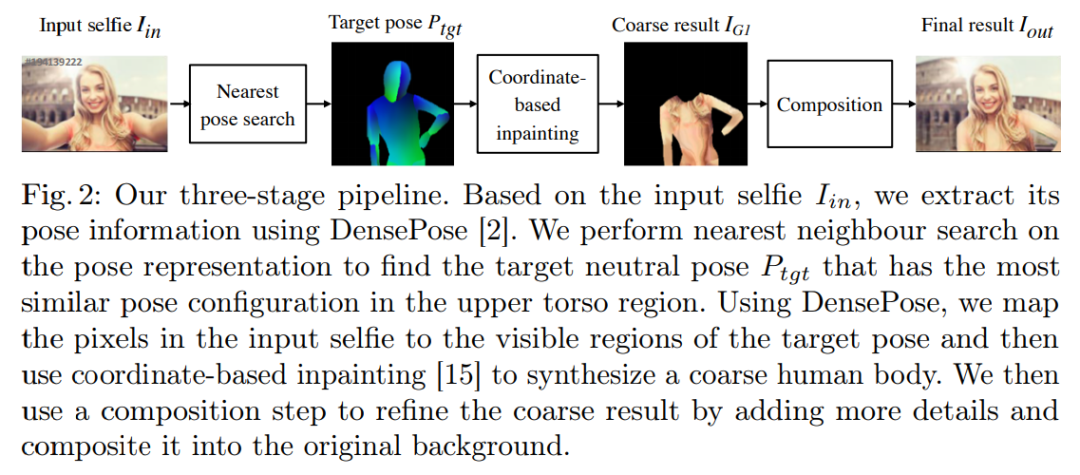
总的来说,为了解决「unselfie」任务,研究者提出了下图所示的三段式 pipeline:
首先在数据库中搜索最相近的他拍姿势,然后执行基于坐标的身体纹理修补,最后使用合成模块来细化结果,并在背景上合成它们。
实验结果
研究者在定性评估、用户研究和定量评估三方面将他们提出的方法与以往类似方法进行了比较。
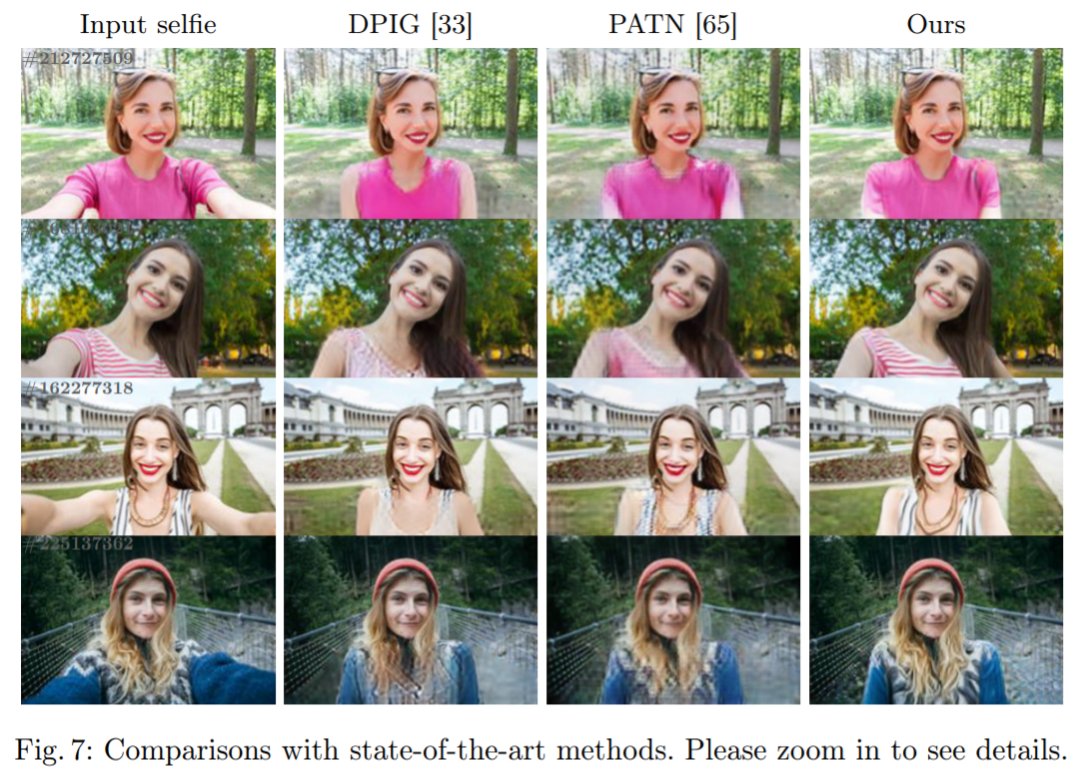
下图 7 表明,与之前的 DPIG 和 PATN 方法相比,Unselfie 方法生成了更逼真的人体姿势和背景。
研究者在 Amazon Mechanical Turk (AMT)上对该方法以及 DPIG、VUNET 和 PATN 方法进行了用户研究。结果显示,该方法优于其他方法(如下表 1 所示)。
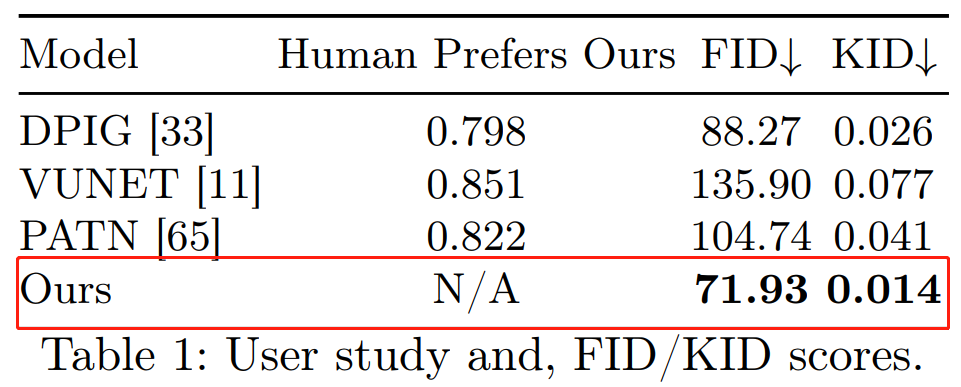
由于没有对应自拍照的 ground truth 他拍照,因而不能使用 SSIM 之类的指标。所以,为了定量比较该方法与其他基准方法的成像结果,研究者使用了 FID 和 KID 两项指标。结果显示,定量比较中的 FID 和 KID 结果与用户研究保持一致,该方法显著优于其他方法。
方法局限
不过,该方法在以下几个方面依然存在局限。
首先,如下图 10(左)所示,对于具有挑战性的自拍姿势或角度来说,最近姿态搜索模块可能难以找到与之匹配的他拍姿态,这导致合成图像中的手臂或肩膀相较于头部区域过细或过宽。
这一问题在 top-1 结果中出现的比例少于 10%,并且用户通常可以从 top-5 结果中找到良好的兼容姿势。
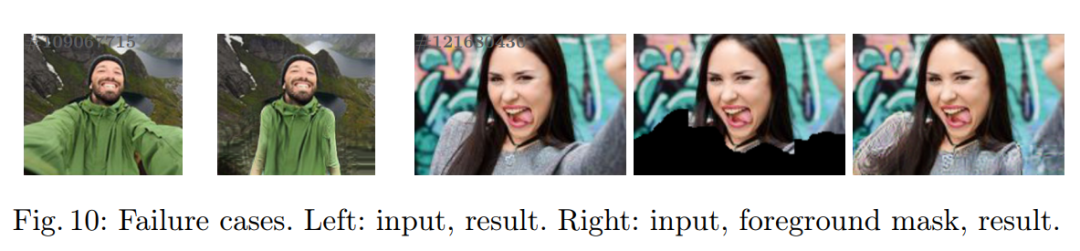
图 10:失败示例
此外,图 10 示例也暴露出了背景合成的局限。不过,针对此问题,研究者在下图 11 中也展示了利用已有模型对图像背景进行修复的示例,从而证明了在大规模数据集上训练的图像修复模型的好处。
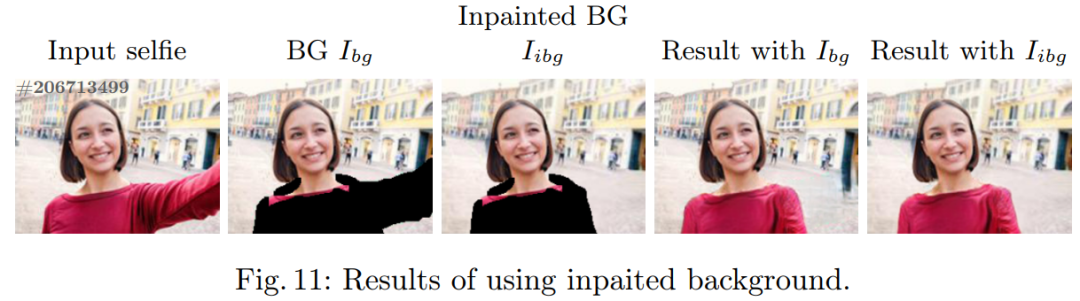
图 11:背景修复
最后,系统在 DensePose 检测中容易出错。如上图 10(右)所示,DensePose 没有检测到她的手臂在前方。所以,合成模块在结果中依然保留了她的手臂。

无源晶振与有源晶振是电子系统中两种根本性的时钟元件,其核心区别在于是否内置振荡电路。晶振结构上的本质差异,直接决定了两者在应用场景、设计复杂度和成本上的不同。

RTC(实时时钟)电路广泛采用音叉型32.768kHz晶振作为时基源,但其频率稳定性对温度变化极为敏感。温度偏离常温基准(通常为25℃)时,频率会产生显著漂移,且偏离越远漂移越大。

有源晶振作为晶振的核心类别,凭借其内部集成振荡电路的独特设计,无需依赖外部电路即可独立工作,在电子设备中扮演着关键角色。本文将系统解析有源晶振的核心参数、电路设计及引脚接法,重点阐述其频率稳定度、老化率等关键指标,并结合实际电路图与引脚定义,帮助大家全面掌握有源晶振的应用要点,避免因接线错误导致器件失效。

晶振老化是影响其长期频率稳定性的核心因素,主要表现为输出频率随时间的缓慢漂移。无论是晶体谐振器还是晶体振荡器,在生产过程中均需经过针对性的防老化处理,但二者的工艺路径与耗时存在显著差异。

在现代汽车行业中,HUD平视显示系统正日益成为驾驶员的得力助手,为驾驶员提供实时导航、车辆信息和警示等功能,使驾驶更加安全和便捷。在HUD平视显示系统中,高精度的晶振是确保系统稳定运行的关键要素。YSX321SL是一款优质的3225无源晶振,拥有多项卓越特性,使其成为HUD平视显示系统的首选。



