发布时间:2023-06-10 阅读量:80023 来源: 我爱方案网 作者:
AP6256是正基科技推出的一款低成本,低功耗的双模模块。是一款SDIO接口单通道802.11ac双频支持BT5.0 蓝牙WiFi二合一模块。
Model:AP6256:SDIO WIFI + UART BT
Chip:BCM43456
WiFi: 2.4G&5G
BT:5.0
WIFI Throughput:up:196 Mbits/sec down: 187 Mbits/sec
/* SDIO接口Wi-Fi专用配置:SDIO接口节点 */&sdio {
max-frequency =<150000000>; /* sdio接口的最大频率,可调整 */
supports-sdio;
bus-width =<4>; /* 4线模式,可调整1线模式 */
disable-wp;
cap-sd-highspeed;
cap-sdio-irq;
keep-power-in-suspend;
mmc-pwrseq = <&sdio_pwrseq>;
non-removable;
num-slots =<1>;
pinctrl-names = "default";
pinctrl-0 = <&sdiom0_pins>;
sd-uhs-sdr104; /* 支持SDIO3.0 */
status = "okay";};
WIFI_REG_ON: Wi-Fi的电源使能PIN脚配置 ( 控制WIFI模块电源的GPIO )
WL_REG_ON由sdio_pwrseq节点进行管理控制,不需要在wireless-wlan节点下面重复添加WIFI,poweren_gpio配置;
/* SDIO接口Wi-Fi专用配置: WIFI_REG_ON: Wi-Fi的电源使能PIN脚 */
sdio_pwrseq: sdio-pwrseq {
compatible = "mmc-pwrseq-simple";
clocks = <&hym8563>;
clock-names = "ext_clock";
pinctrl-names = "default";
pinctrl-0 = <&wifi_enable_h>;
reset-gpios = <&gpio0 rk_pc4="" gpio_active_low="">; /*跟电源使能状态恰好相反:高有效为LOW,低有效则为HIGH。切记:这个配置跟下面的WIFI,poweren_gpio是互斥的,不能同时配置!!!*/
/*特别注意:reset-gpios的GPIO_ACTIVE 配置跟poweren_gpio配置的电源使能状态恰好是相反的*/ };
/* SDIO接口Wi-Fi专用配置:WIFI_REG_ON脚的pinctrl的配置 */
&pinctrl {
sdio-pwrseq {
wifi_enable_h: wifi-enable-h {
rockchip,pins =<0 rk_pc4="" rk_func_gpio="" pcfg_pull_none="">; /* 对应上面的WIFI_REG_ON,关掉上下拉,防止不能拉高或拉低 */ };
};}
WIFI节点配置
/* Wi-Fi节点 */
wireless_wlan: wireless-wlan {
compatible = "wlan-platdata";
wifi_chip_type = "ap6256"; //模块名称
pinctrl-names = "default";
pinctrl-0 = <&wifi_host_wake_irq>;
WIFI,host_wake_irq = <&gpio0 rk_pb2="" gpio_active_high="">; //WIFI模块唤醒CPU的
//WIFI,poweren_gpio = <&gpio0 rk_pc4="" gpio_active_high="">; //控制WIFI模块电源的GPIO,配置了sdio_pwrseq就不需要再配置poweren_gpio
status = "okay";
};
WIFI,host_wake_irq的配置说明:
WIFI,host_wake_irq = <&gpio0 rk_pb2="" gpio_active_high="">; /* WIFI_WAKE_HOST: Wi-Fi中断通知主控的PIN脚。
* 特别注意:确认下这个Wi-Fi pin脚跟主控的pin的硬件连接关系,直连的话就是GPIO_ACTIVE_HIGH;* 如果中间加了一个反向管就要改成低电平GPIO_ACTIVE_LOW触发
*/
WIFI_WAKE_HOST脚的pinctrl的配置:
&pinctrl {
wireless-wlan {
wifi_host_wake_irq: wifi-host-wake-irq {
rockchip,pins =<0 rk_pb2="" rk_func_gpio="" pcfg_pull_down="">;
};
};}/* 注意一般Wi-Fi的wake host pin都是高电平触发,
* 所以默认这里要配置为下拉; 如果客户的硬件设计
* 是反向的则要改为上拉,总之要初始化为与触发电平
* 相反的状态
*/
以下UART相关的都要配置为实际使用的UART口的所对应PIN,注意RTS/CTS pin一定要按照SDK设计
接(具体接法参考7.3章节的UART描述),很多客户反馈的异常都是因为这两个PIN脚没有接导致初始化
异常,下面假设蓝牙使用UART4:
bt_uart6: wireless_bluetooth: wireless-bluetooth {
compatible = "bluetooth-platdata";
clocks = <&hym8563>; //外部时钟
clock-names = "ext_clock";
uart_rts_gpios = <&gpio1 rk_pa2="" gpio_active_low="">; //uart的rts脚
pinctrl-names = "default", "rts_gpio";
pinctrl-0 = <&uart6m1_rtsn>;
pinctrl-1 = <&uart6_gpios>;
BT,reset_gpio = <&gpio3 rk_pa6="" gpio_active_high="">; //蓝牙的复位脚
BT,wake_host_irq = <&gpio0 rk_pc5="" gpio_active_high="">; //蓝牙模块唤醒CPU的GPIO
status = "okay";
};
&pinctrl {
wireless-bluetooth {
uart6_gpios: uart6-gpios {
rockchip,pins =<1 rk_pa2="" rk_func_gpio="" pcfg_pull_none="">;
};
};
}
蓝牙对应的uart6配置
/* 打开对应的UART配置 */&uart6 {
pinctrl-names = "default";
/* 这里配置对应主控UART的TX/RX/CTS PIN ,不要配置RTS PIN*/
pinctrl-0 = <&uart6m1_xfer uart6m1_ctsn="">;
status = "okay";};
MK文件中定义的Kernel defconfig:
kernel的defconfig对应到这个文件: “kernel\arch\arm64\configs\rockchip_linux_defconfig”
# Kernel defconfigexport RK_KERNEL_DEFCONFIG=rockchip_linux_defconfig
cd kernelmake ARCH=arm64 menuconfigmake savedefconfig
选择:Device Drivers —> Network device support —> Wireless LAN —> Rockchip Wireless LAN support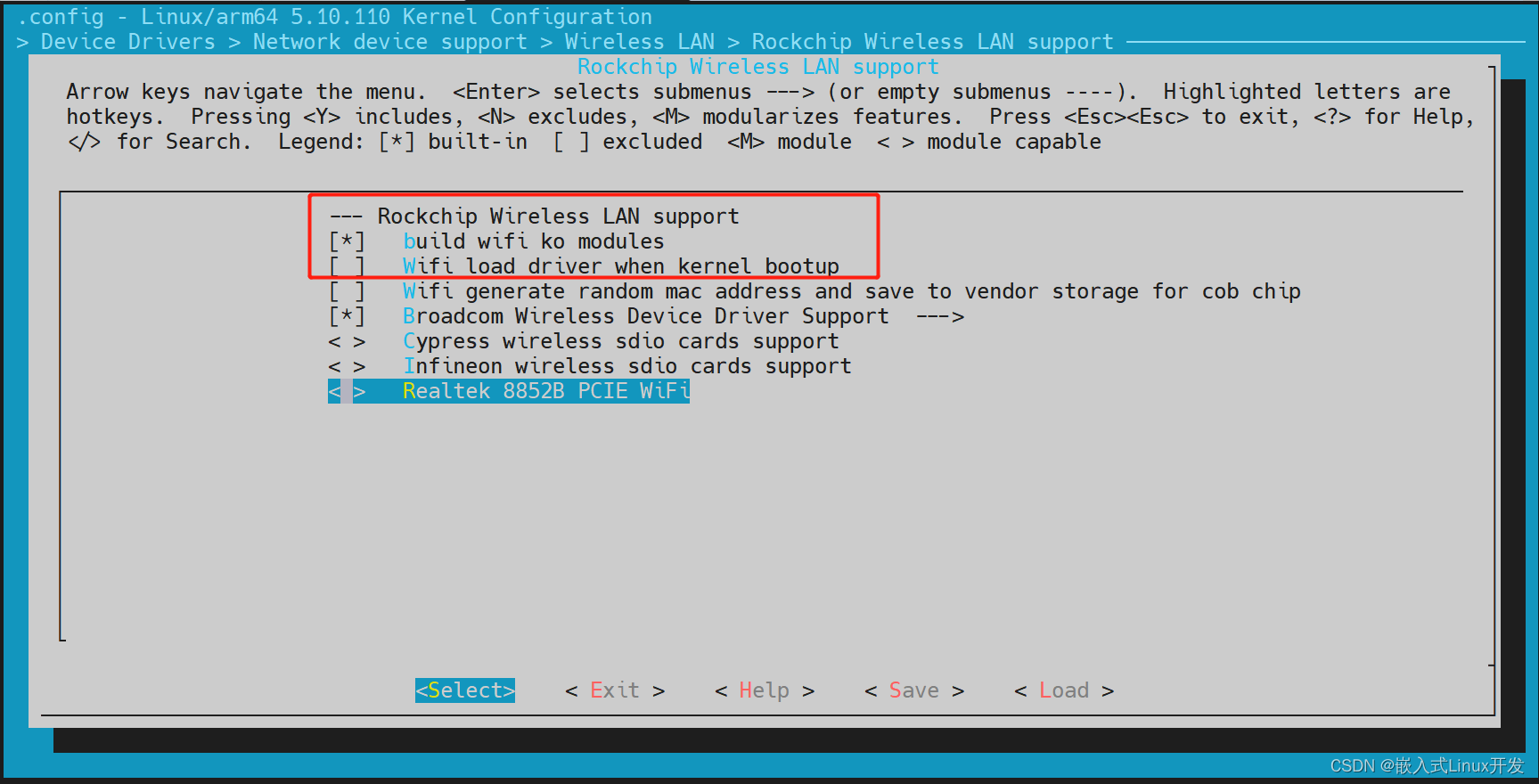
Wi-Fi驱动可编译到内核或者ko方式, 切记下面两个配置必须二选一,否则Wi-Fi无法加载!
KO 配置:[* ] build wifi ko modules
CONFIG_WIFI_BUILD_MODULE=y# CONFIG_WIFI_LOAD_DRIVER_WHEN_KERNEL_BOOTUP is not set
buildin 配置:[* ] Wifi load driver when kernel bootup
CONFIG_WIFI_LOAD_DRIVER_WHEN_KERNEL_BOOTUP=y CONFIG_WIFI_BUILD_MODULE is not set
buildin 只能选择一个型号,realtek 模组和 ap6xxx 模组不能同时选择为y,且realtek的也只能选择其
中一个;
ap6xxx 和 cypress 也是互斥的,只能选择一个且如果选择ap6xxx,cypress的配置自动消失,去掉ap
配置,cypress自动出现;
ko方式则可以选择多个Wi-Fi
正基和海华的模块使用内核的默认CONFIG_BT_HCIUART 驱动:
cd kernelmake ARCH=arm64 menuconfigmake savedefconfig
选择: Networking support —> Bluetooth subsystem support —> Bluetooth device drivers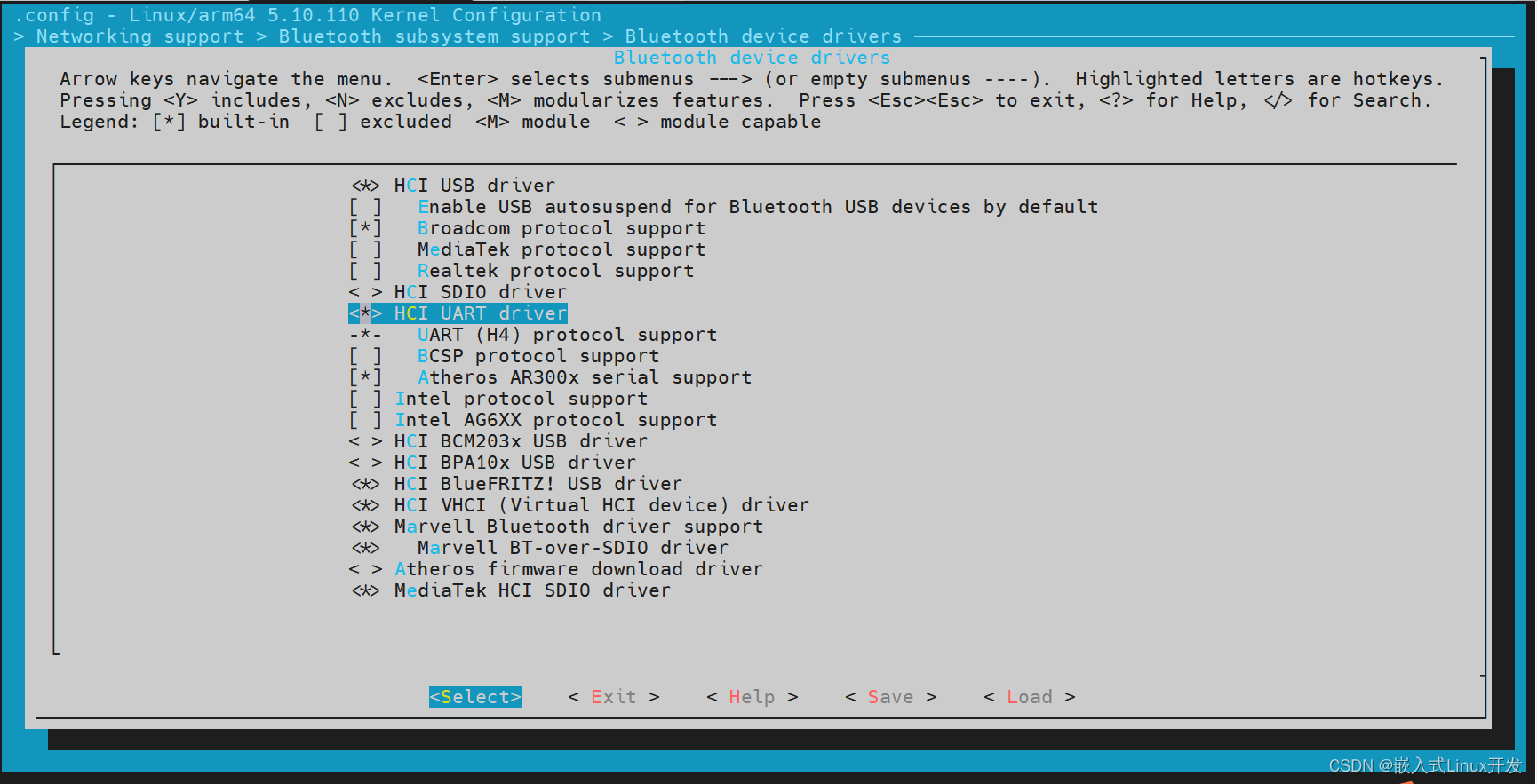
注意:配置完成后要保存到对应的defconfig
正基/海华模组以AP6256为例:对应的Wi-Fi/BT的firmware在SDK中的位置:
external/rkwifibt/firmware/broadcom/AP6256/
├── bt
│ └── BCM4345C5.hcd
└── wifi
├── fw_bcm43456c5_ag.bin
├── fw_bcm43456c5_ag_mfg.bin
└── nvram_ap6256.txt
经过编译规则编译后,对应的文件被拷贝到工程的output目录:(kernel4.19内核由system变更为vendor目录)
buildroot/output/rockchip_rk3xxxx/target/
/system(vendor)/lib/modules/bcmdhd.ko
驱动ko(如果是ko编译的话)/system(vendor)/etc/firmware/fw_bcm43456c5_ag.bin
驱动firmware文件存放位置/system(vendor)/etc/firmware/fw_bcm43456c5_ag_mfg.bin
驱动firmware文件存放位置/system(vendor)/etc/firmware/nvram_ap6256.txt
驱动nvram文件存放位置/system(vendor)/etc/firmware/BCM4345C5.hcd
蓝牙firmware文件(如果有蓝牙功能)
最终烧录到机器中后,Wi-Fi运行时所需的文件及存放位置:
/system(vendor)/lib/modules/bcmdhd.ko #驱动ko(如果是ko编译的话)/system(vendor)/etc/firmware/fw_bcm43456c5_ag.bin
驱动firmware文件存放位置/system(vendor)/etc/firmware/fw_bcm43456c5_ag_mfg.bin
驱动firmware文件存放位置/system(vendor)/etc/firmware/nvram_ap6256.txt #驱动nvram文件存放位置/system(vendor)/etc/firmware/BCM4345C5.hcd
蓝牙firmware文件(如果有蓝牙功能)
mk文件配置路径:3588_linux5.10_v1.0.5/device/rockchip/rk3588/BoardConfig-rk3588-pi5.mk
兼容正基和Realtek
RK_WIFIBT_TTY这个参数根据蓝牙对应的串口来配置,此处蓝牙对应的是uart6
Define WiFi BT chip
Compatible with Realtek and AP6XXX WiFi : RK_WIFIBT_CHIP=ALL_AP
Compatible with Realtek and CYWXXX WiFi : RK_WIFIBT_CHIP=ALL_CY
Single WiFi configuration: AP6256 or CYW43455: RK_WIFIBT_CHIP=AP6256export RK_WIFIBT_CHIP=ALL_AP
Define BT ttySXexport RK_WIFIBT_TTY=ttyS6

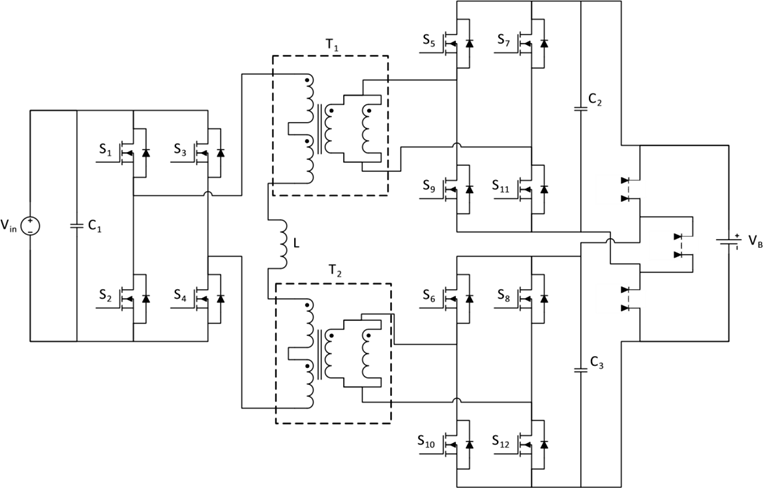
碳化硅(SiC)功率器件正以颠覆性优势引领工业充电器变革——其超快开关速度与超低损耗特性,驱动功率密度实现跨越式提升,同时解锁了传统IGBT无法企及的新型拓扑架构。面对工业应用对高效隔离式DC-DC转换的严苛需求,本文将深入解析从600W至深入解析从600W至30kW全功率段的拓扑选型策略,揭示SiC技术如何成为高功率密度设计的核心引擎。
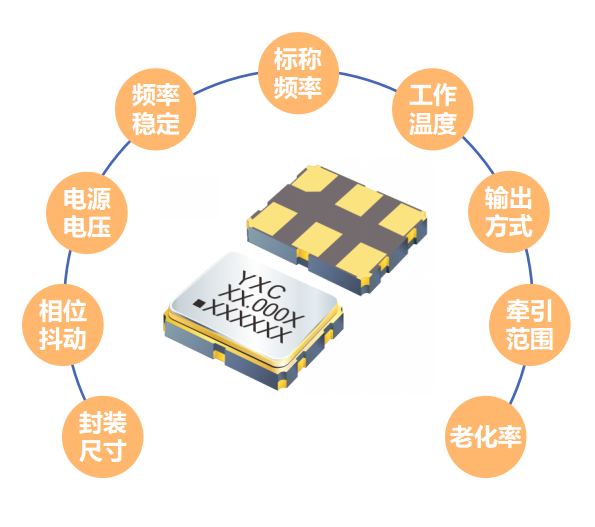
在汽车电子智能化、网联化与电动化深度融合的浪潮中,车载时钟系统的精度与可靠性正成为决定整车性能的核心命脉。作为电子架构的"精准心跳之源",车规级晶振的选型直接影响ADAS感知、实时通信、动力控制等关键功能的稳定性。面对严苛路况、极端温差及十年以上的生命周期挑战,工程师亟需兼具高稳定性与强抗干扰能力的时钟解决方案——小扬科技将聚焦车规级晶体/晶振核心参数,3分钟助您精准锁定最优型号。
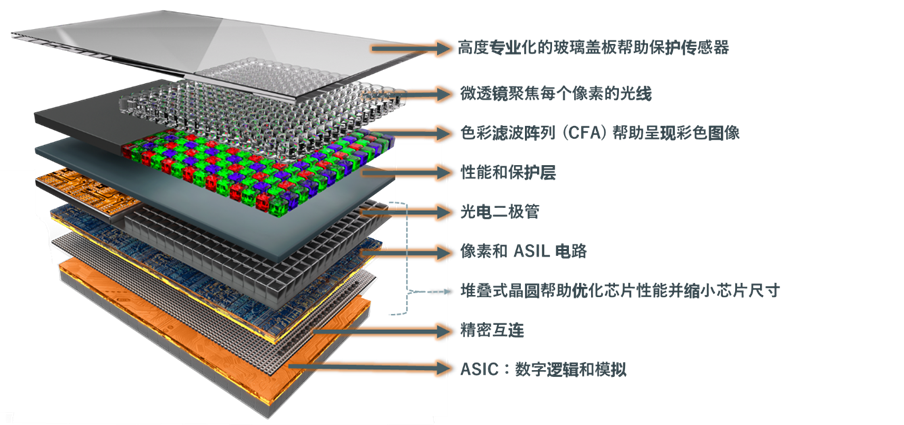
在技术创新的浪潮中,图像传感器的选型是设计与开发各类设备(涵盖专业与家庭安防系统、机器人、条码扫描仪、工厂自动化、设备检测、汽车等)过程中的关键环节。选择最适配的图像传感器需要对众多标准进行复杂的综合评估,每个标准都直接影响最终产品的性能和功能。从光学格式(Optical Format)和动态范围(Dynamic Range),到色彩滤波阵列(CFA)、像素类型、功耗及特性集成,这些考量因素多样且相互交织、错综复杂。
压控晶振(VCXO)作为频率调控的核心器件,已从基础时钟源升级为智能系统的"频率舵手"。通过变容二极管与石英晶体的精密耦合,实现电压-频率的线性转换,其相位噪声控制突破-160dBc/Hz@1kHz,抖动进入亚纳秒时代(0.15ps)。在5G-A/6G预研、224G光通信及自动驾驶多传感器同步场景中,VCXO正经历微型化(2016封装)、多协议兼容(LVDS/HCSL/CML集成)及温漂补偿算法的三重技术迭代。
在电子设备的精密计时体系中,晶体振荡器与实时时钟芯片如同时间系统的"心脏"与"大脑":晶振通过石英晶体的压电效应产生基础频率脉冲,为系统注入精准的"生命节拍";而实时时钟芯片则承担时序调度中枢的角色,将原始频率转化为可追踪的年月日时分秒,并实现闹钟、断电计时等高级功能。二者协同构建现代电子设备的"时间维度"。



