发布时间:2025-03-7 阅读量:3998 来源: 发布人: lina
【导读】威世科技Vishay宣布,推出一款全新Cyllene 2 IC,以升级消费品中红外(IR)遥控应用的VSOP383xx系列前置放大电路。这些增强型解决方案采用2mm x 2mm x 0.76mm的QFN封装,以即插即用方式替代该系列中现有的器件,同时提供2.0 V至5.5 V的更宽电源电压范围,高37 %的黑暗环境灵敏度,以及在强DC光和Wi-Fi噪声下的更优性能。
这些器件采用紧凑型QFN封装,可提供更宽的电压范围、增强的黑暗环境灵敏度,以及在强DC光和Wi-Fi噪声下的更优性能
2025年3月5日 — 日前,威世科技Vishay Intertechnology, Inc.(NYSE 股市代号:VSH)宣布,推出一款全新Cyllene 2 IC,以升级消费品中红外(IR)遥控应用的VSOP383xx系列前置放大电路。这些增强型解决方案采用2mm x 2mm x 0.76mm的QFN封装,以即插即用方式替代该系列中现有的器件,同时提供2.0 V至5.5 V的更宽电源电压范围,高37 %的黑暗环境灵敏度,以及在强DC光和Wi-Fi噪声下的更优性能。

Vishay VSOP383xx系列前置放大器电路采用紧凑型封装,在更宽的电压范围内实现低功耗,从而延长电池寿命,并节省移动设备的空间。通过使用Vishay最新的自有IC技术升级组件,可确保产品的长期供货,并缩短向客户交付产品的周期。作为现有解决方案的直接替代产品——没有机械差异且电气特性相似,这些器件不需要对PCB进行重新设计,有助于节省成本。
前置放大器电路的设计目的是与光电二极管配合使用,用于电视、音响、游戏机、机顶盒(STB)、音频设备等的红外遥控。针对这些产品中的遥控功能,器件增强了对不同种类的灯的抗干扰能力,并且对电源电压上的纹波噪声提供了很高的抗扰度。此外,该解决方案不易受2.4 GHz和5 GHz频率的电磁干扰(这些电磁干扰可能导致不必要的输出脉冲)影响,因此可以放置在Wi-Fi天线附近,以提高设计灵活性,同时,器件在明亮阳光下的稳定性使其适合户外使用。
这些器件符合RoHS标准,无卤素,并满足Vishay绿色标准,载波频率有36 kHz(VSOP38336)和38 kHz(VSOP38338)两种。
升级版前置放大器电路现可提供样品并已实现量产,供货周期为4-6周。
VISHAY简介
Vishay 是全球最大的分立半导体和无源电子元件系列产品制造商之一,这些产品对于汽车、工业、计算、消费、通信、国防、航空航天和医疗市场的创新设计至关重要。服务于全球客户,Vishay承载着科技基因——The DNA of tech. ®。Vishay Intertechnology, Inc. 是在纽约证券交易所上市(VSH)的“财富1,000 强企业”。
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理。
推荐阅读:
基于以NXP产品为主的汽车UWB Digital-Key Kit应用方案

台积电 3nm 制程原定于 2026 年底实现的月投片量 18 万片目标,有望提前至第四季度初达成

威世科技(Vishay)近日宣布推出新型车规级1 MBd高速光耦合器——VOMHA43A。该器件采用宽度仅为3.6毫米的窄体SOP-5封装,并已成功通过严苛的AEC-Q102车规认证。在性能方面,VOMHA43A提供了至少40 kV/μs的共模瞬态抗扰度(CMTI)以及高达707 Vpeak的最高重复峰值隔离电压,能够完美适配CAN、LIN、I²C和SPI等通信总线的隔离需求,以及智能功率模块(IPM)的驱动隔离。目前,该器件已提供样品并实现量产供货,交货周期仅为六周。
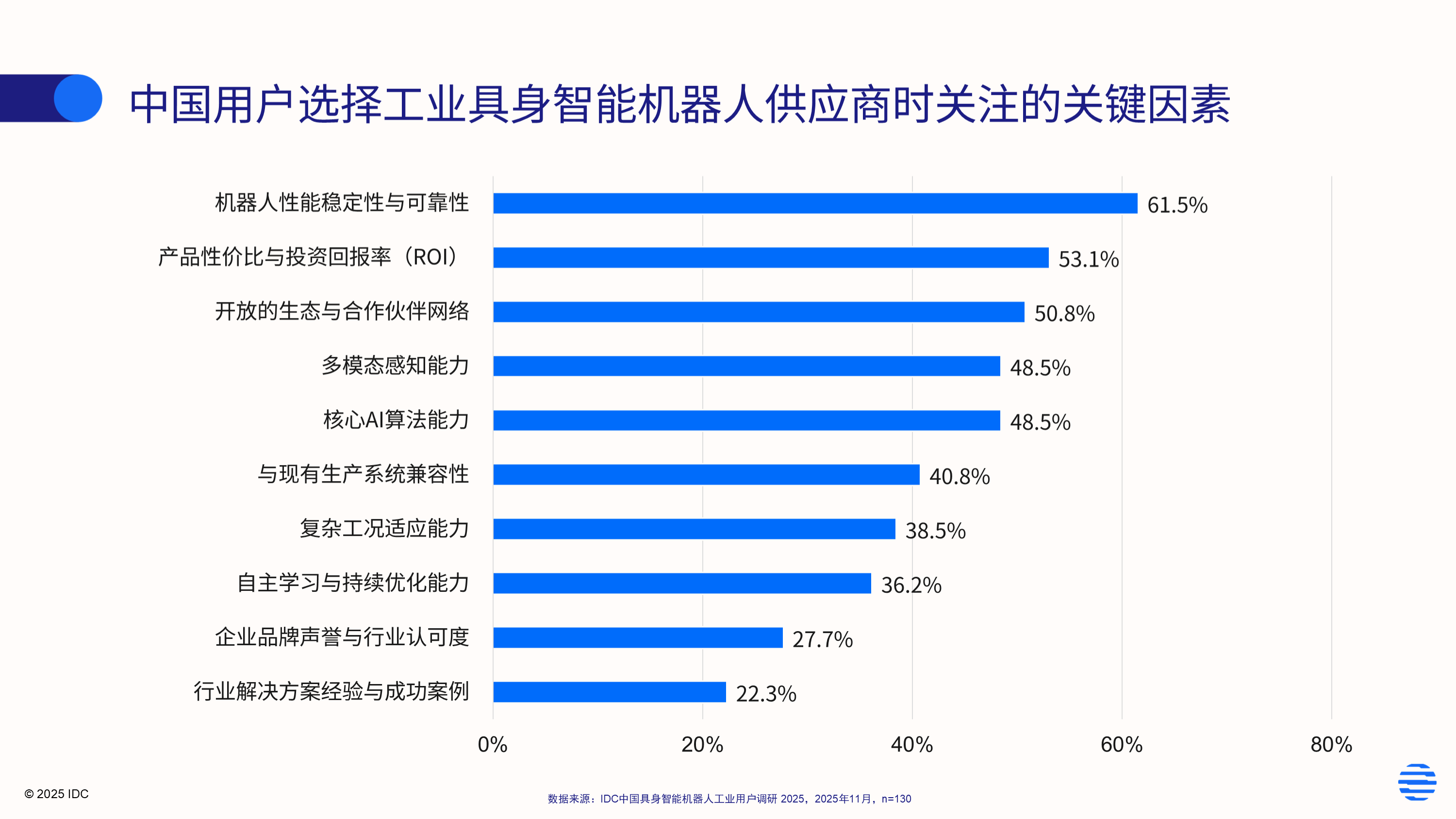
在WAIC 2026上,物理AI(Physical AI)跃升为产业界瞩目的核心焦点。作为物理世界中数据最为密集、任务高度复杂且商业价值最为清晰的领域,工业制造正迅速成为Physical AI率先实现规模化落地的“主阵地”。其中,工业具身智能机器人作为Physical AI在制造领域的典型应用形态,正迎来爆发式增长。国际数据公司(IDC)最新数据显示,2025年中国工业具身智能机器人市场规模已达约57.4亿元,其中以工业机器人为载体的具身智能应用市场规模约为36.2亿元,构成了当前商业化落地的绝对主力。随着产业竞争的重心从单一的机器人本体性能,全面转向模型、数据、工程化及场景落地能力的综合较量,工业具身智能机器人已不可逆转地成为驱动智能制造升级的核心方向。 基于这一深刻的产业演进趋势,IDC近期重磅发布了《中国工业具身智能机器人市场份额,2025》与《中国工业具身智能机器人技术评估,2026》两项权威研究报告。报告从市场格局、技术能力演进及未来产业发展趋势等多个维度,对中国工业具身智能机器人产业进行了全景式剖析。本文将深度结合这两项研究的核心洞察,对工业具身智能机器人的内涵定义、市场发展脉络、竞争格局演变及未
作为此次认证的接收方,信骅科技在全球BMC市场占据着举足轻重的领导地位。其最新推出的AST2700是信骅科技的第八代BMC产品,采用了先进的12 nm制程技术。相较于前代产品,AST2700不仅在管理能力上实现了全面跃升,更大幅强化了信息安全防护水平与系统整合度。英飞凌SEMPER™ NOR闪存与AST2700的结合,将为新一代AI服务器提供更加安全、高效的底层管理基石。
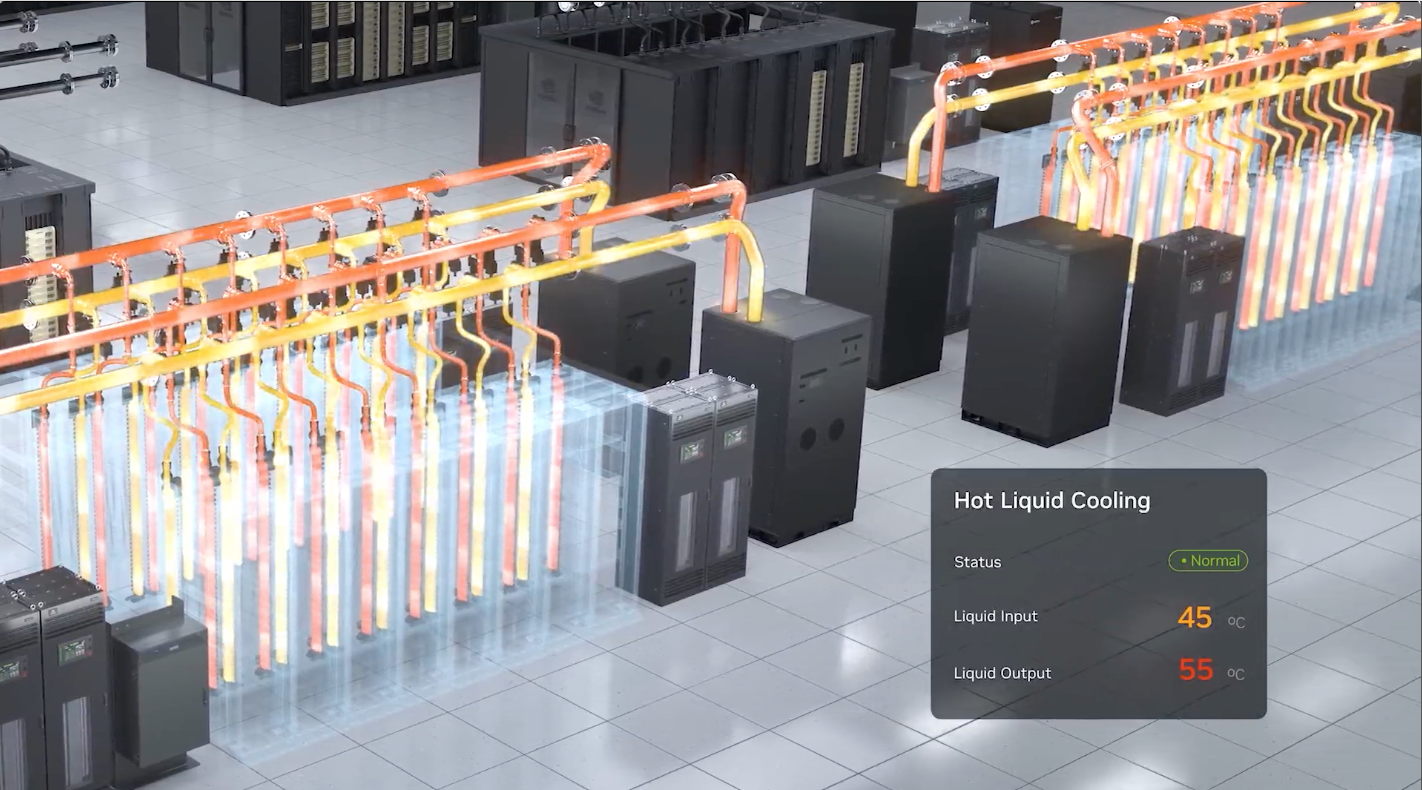
英伟达近日通过官方博客披露了Vera Rubin平台的核心散热架构:该平台彻底摒弃了传统风扇,将每一颗芯片与网络组件均纳入闭环液体冷却系统,且冷却液运行温度高达45℃。作为全球首个实现100%全液冷的AI计算平台,Rubin的问世在产业界引发了强烈震动。这一突破不仅意味着硬件参数的又一次跃升,更释放出一个明确的行业信号:在AI时代,液冷技术已正式跨越“可选项”的范畴,成为支撑算力发展的绝对“入场券”。




