发布时间:2026-03-12 阅读量:2300 来源: 发布人: suii
前言
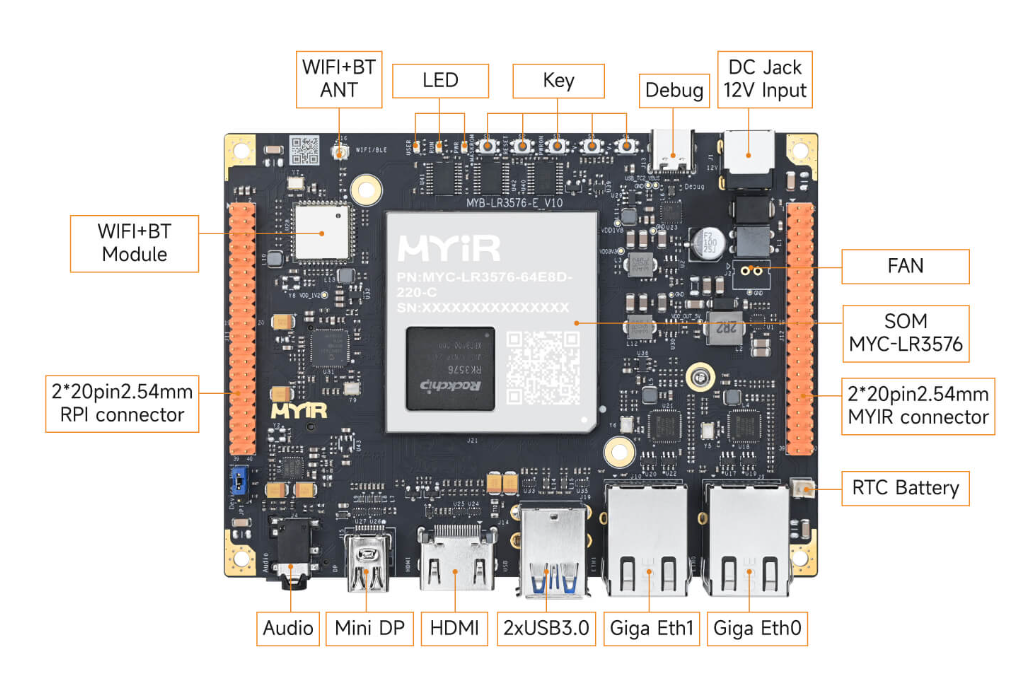
本文面向具备一定ROS基础,并期望在实际项目中完整部署与运用ROS2 Humble、SLAM Toolbox及Nav2组合系统以实现机器人建图与导航功能的工程师。我们将从零开始,基于RK3576开发板逐步构建一个功能完备的自主移动机器人系统,涵盖环境搭建、机器人建模、SLAM建图、自主导航以及生产级系统的优化与排错。
为什么选择SLAM Toolbox + Nav2?
在ROS2生态中,SLAM(同时定位与建图)与导航(Navigation)是机器人自主移动的核心技术。SLAM Toolbox由Steve Macenski主导开发,是基于成熟Karto SLAM的改进版本,相比传统的Gmapping、Hector SLAM或Cartographer,它具有以下显著优势:
· 图优化框架:采用基于图优化的后端,而非简单的滤波器,在大场景下地图一致性更好。
· 生命周期管理:支持终身地图(LifeLong Mapping),即可以在已有地图基础上继续优化或更新,甚至能够移除动态物体留下的痕迹。
· 多种运行模式:同步/异步建图、纯定位模式(可作为AMCL的高精度替代品)、地图序列化与反序列化。
· RViz交互插件:提供丰富的RViz工具,支持手动修正地图、操作图节点。
· 性能卓越:经过优化,能够在数十万平方英尺的场景中实时运行。
而Nav2作为ROS2的官方导航框架,继承了ROS1 Navigation Stack的优点并进行了完全的重构,支持行为树、更灵活的插件化架构和更好的实时性保障。将SLAM Toolbox与Nav2结合,我们可以基于RK3576开发板构建一套从建图到定位导航的无缝衔接系统,甚至可以在导航过程中边建图边导航(Navigation while Mapping)。
核心技术栈概览
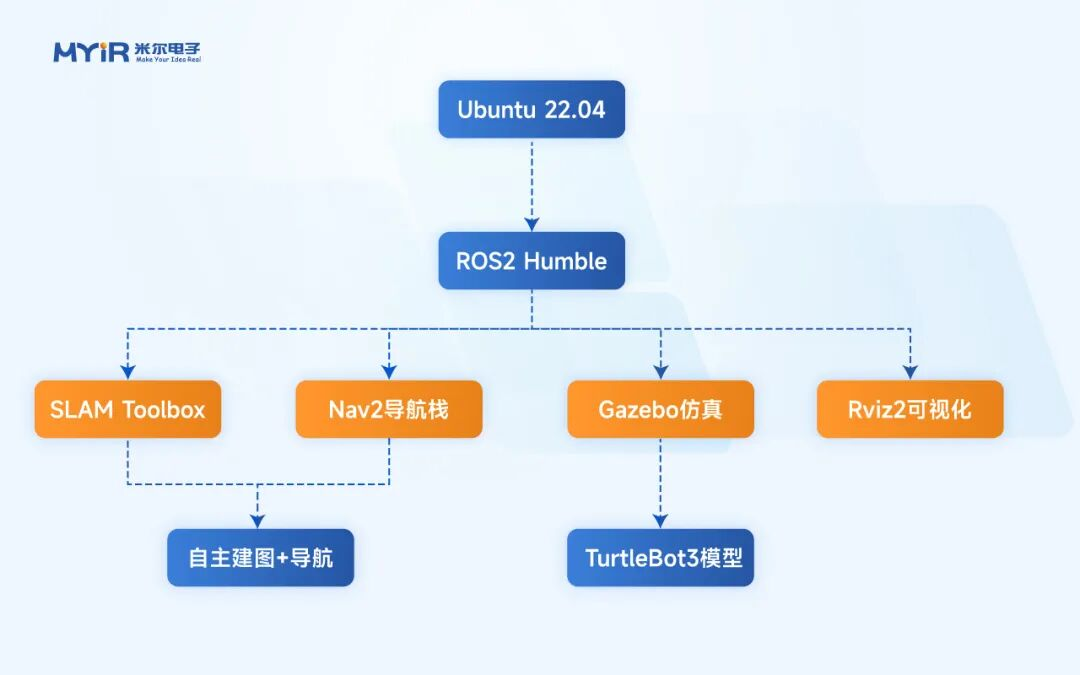
· 操作系统:Ubuntu 22.04 LTS (Jammy)
· ROS发行版:ROS2 Humble Hawksbill (长期支持版)
· 仿真环境:Gazebo Classic 11 (与ROS2 Humble官方集成)
· 机器人建模:URDF / Xacro
· SLAM库:slam_toolbox (版本 ≥ 2.6.10)
· 导航栈:Nav2 (navigation2, nav2_bringup)
· 可视化与调试:Rviz2, tf2_tools, rqt_graph
备注:本文由于版面限制,代码不全,需要完整内容可联系作者
第一章:环境搭建与准备工作
1.1 操作系统与ROS2 Humble安装
1.2 安装仿真环境(Gazebo)与机器人模型
1.3 安装核心算法包:SLAM Toolbox与Nav2
1.4 创建工作空间与测试安装
第二章:机器人建模与仿真集成
2.1 URDF/Xacro基础与传感器配置
2.2 坐标系变换(TF)树详解:map -> odom -> base_link -> sensor_link
第三章:SLAM Toolbox深度实践与建图
3.1 SLAM Toolbox的两种核心模式:同步与异步
online_async_launch.py(异步,常用)和 online_sync_launch.py(同步)。
3.2 配置文件详解:mapper_params_online_async.yaml

3.3 手动建图流程与保存地图
3.4 高级话题:终身地图与位姿图序列化
第四章:Nav2导航系统构建与配置
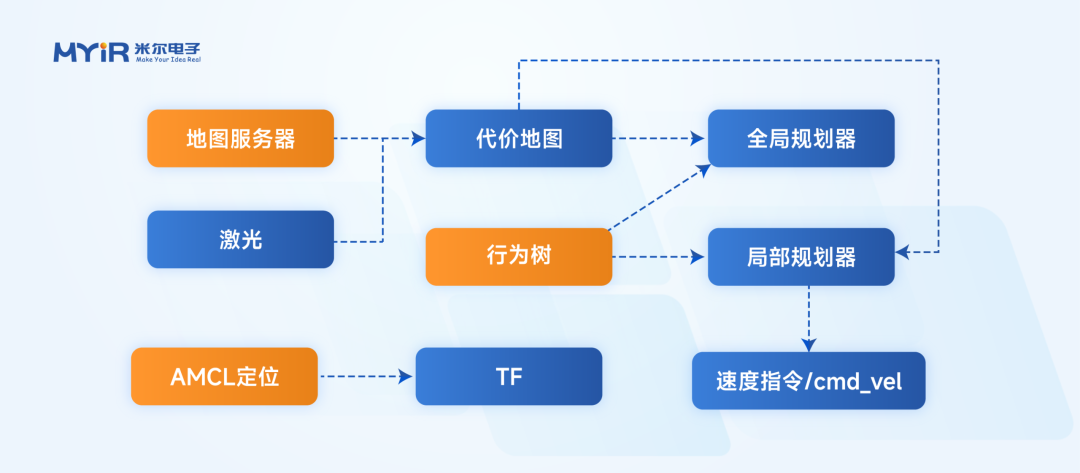
4.1 Nav2架构与核心组件
· 地图服务器、AMCL、代价地图(全局/局部)、规划器(Planner)、控制器(DWB)、行为树导航器(BT Navigator)。
4.2 Nav2参数配置实战(nav2_params.yaml节选)
4.3 启动Nav2:基于已有地图的导航
4.4 集成SLAM Toolbox定位模式替代AMCL
第五章:高级整合与调试
5.1 边建图边导航(Navigation while Mapping)
启动仿真 + SLAM建图模式 + navigation_launch.py(不含map_server/amcl),然后通过RViz设定目标,机器人一边探索一边建图。
5.2 RViz插件:SLAM Toolbox图形化工具
Panels -> Add Panel -> SlamToolboxPlugin 可手动保存、清除节点、强制闭环。
5.3 性能分析与优化
· 分析CPU/内存:

· 检查话题频率:
· SLAM优化:使用snap版slam-toolbox;增大 ;增大节点添加阈值。
;增大节点添加阈值。
· Nav2优化:降低 ;增大局部代价地图分辨率;减少DWB采样。
;增大局部代价地图分辨率;减少DWB采样。
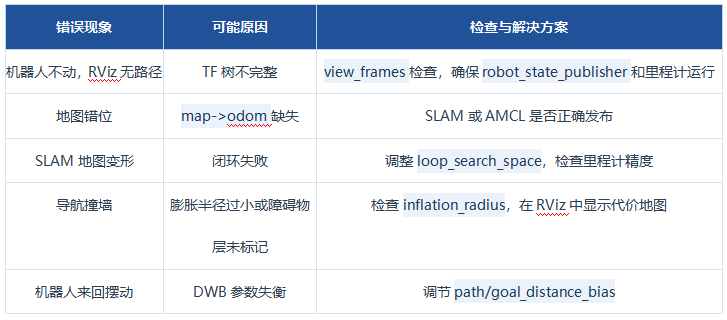
5.4 常见错误排解指南
第六章:实体机器人部署指南
6.1 硬件抽象与驱动层
· 激光雷达驱动:例如

· 里程计融合:使用 的
的 融合编码器与IMU。
融合编码器与IMU。
6.2 参数调整:从仿真到现实
· 精确测量
· 降低最大速度/加速度
· 增大 (如0.5m)
(如0.5m)
· 调大SLAM的 和
和
6.3 启动系统:Bringup的模块化设计
·  :底层驱动 + robot_state_publisher
:底层驱动 + robot_state_publisher
·  :包含硬件 + SLAM Toolbox
:包含硬件 + SLAM Toolbox
·  :包含硬件 + 定位 + Nav2核心
:包含硬件 + 定位 + Nav2核心
第七章:总结与展望
7.1 本文总结
从环境搭建、URDF建模、SLAM建图、Nav2导航到基于RK3576开发板的实体部署,全面覆盖了ROS2 Humble下SLAM Toolbox的自主机器人系统构建过程。
7.2 下一步研究方向
· 多机器人SLAM与地图合并
· 语义导航(目标检测+导航)
· 强化学习局部规划器
· 3D导航(3D激光雷达+体素网格)
附录:常用命令速查表

HPM5E3Y内置EtherCAT控制器和PHY,体积非常小,最小封装只有9×9毫米

具身机器人企业银河通用在官微宣布,已完成25亿元新一轮融资。 此次投资方阵容强大,涵盖国家人工智能产业投资基金、中国石化、中信投资控股、中银资产、上汽金控、中芯聚源、亦庄国投、鲲鹏基金、无锡创投、福建产投、成都科创投等,且多家老股东继续追加投资。

如今的数字液晶仪表盘拥有更友好的HMI界面,多功能高精度、高灵敏度、接口丰富及更强的可扩展性
工业级3D打印机大多会使用MPU负责逻辑运算,MCU负责执行,可实现更高的打印速度和打印质量
在工业4.0的推动下,工业人机界面(HMI)已演进为集成实时监控、数据追溯与远程运维功能的智能化终端。无论是产线状态记录、故障报警的精确时间标记,还是构建全流程可追溯的日志链条,高精度、连续稳定的时间基准,都直接决定了HMI系统的运行可靠性与数据可信度。



