发布时间:2013-09-17 阅读量:1794 来源: 发布人:
一个LED可以做成频闪灯,一根直线排列的LED可以做成走马灯,一个正方形的 LED可以形成点阵,根据这条规律,能否做一个立体的LED呢?在这个想法下,我便开始动手DIY了。最后制作成了一个在立体上显示的走马灯,把LED制作成一个立体上显示走马灯,这样就不会把走马灯的花式局限于平面了。
创意立体LED走马灯演示视频:

电路很简单,只有驱动和LED显示部分,每行由红绿蓝LED排列顾不同顺序,以避免相连的两个LED相同的颜色,显示出七彩缤纷的效果,按键用来切换流动花样和循环全部花样,所需器件包括:20脚STC11F02单片机一块(可以用同类的STC的20脚单片杠机替代)、5cm*7cm万用板一块、470Ω电阻9个、微动按键2个、红绿蓝LED各9个(最好选用高亮的LED)、裸露铜线若干条。

如电路图2所示,LED排列成上、中、下3层,每一层LED的负极分别接到不同的I/O口上,9个LEDC也接到不现的9个I/O口上,这样,想让哪一个LED亮,就给哪个LED高电平,而这—层控制的I/O口就赋于低电压,由于I/O口输出的电流很小,所以还要加上470Ω的上位电I阻给予足够的电流驱动LED,由于要求每组LED颜色不现,所以制作时必须按照电路图所示的颜色来排列。下面就跟我-步-步地制作吧!
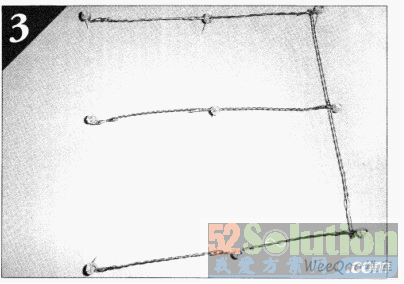
1.用剪刀把废弃电线里的铜丝解剖出来,然后把铜丝重叠在一超旋转拧紧,长度可以根据自已的喜好来定。

2.把LED的负极弯向一边,用焊锡把灯焊接在左中右部位,如附图所示。注意,不同颜色的LED要按照电路图的顺序排列好,铜丝不要跟正极接触。

3.再用1根铜丝把排列好不同颜色的一层焊接固定好,为了坚固分布受力,还要用另外2个铜丝同样焊接在上面围成1个正方形,这样就可以把这层所有的负极连接在一起了。按照同样的方法焊接另外的3层。
4.再用铜丝把3层LED备自控制的3个LED的正极焊接上,同时要注意正极跟负极不要碰触。这样如附图所示,立方体的部分就完成了。为了确保稳定,还要检查一下每个地方的连接是否到位,必要时还要加上更多的锡。

5.下面再来进行驱动部分的焊接、如图所示在相应的位置焊接上元器件,由于是使用STC单片机的内部振荡器。所以就不需要焊接外部晶振,大大简化了电路。我用的是UBS插头供电,你可以根据自已的情况来选择不同的供电方式。

6.如附图所示焊接好驱动板背面。

7.再用排线把两个部分相应的地方焊接上.并月胶布把线包扎起来,插上下载好了程序的单片机,完成这一部分,全部的工作就完成了!

8.成品效果。


恩智浦宣布关闭其位于美国亚利桑那州钱德勒市的ECHO Fab晶圆厂
龙芯中科旗下GPGPU产品9A1000已完成流片并进入交付阶段
三星代工正与AMD就2纳米(SF2)工艺展开深度合作谈判,有望为其下一代Zen 6架构EPYC服务器处理器“Venice”进行代工生产服务。

由于订单需求暴涨,英伟达正在评估提高H200芯片的产能。
紫晶存储犯欺诈发行证券罪,判处罚金人民币3700万元;公司实际控制人郑穆、罗铁威及原财务总监李燕霞等10名核心管理人员,全部被判处有期徒刑,刑期最高达七年六个月。



