发布时间:2016-02-22 阅读量:996 来源: 我爱方案网 作者:
同时,在做这款车的过程中,我们也能学到关于AVR MCU的一些知识。AVR MCU是一个应用性比较广泛的产品,我们想如果能了解比较多的关于AVR MCU 的知识,应该会对我们以后的工作带来很大的益处。
功能要求
通过CMOS摄像头采集路况信息,经CPU处理判断前方是否有障碍物。若无,则车继续引导人前行;若有障碍物,则车发声报警。通过超声波传感器检测,如果可以越过则继续前进,如果无法越过,就停止。如果需要转弯,则减速转弯。同时导盲车上还有GPS导航系统,可以确切知道盲人所处位置。

图1:系统架构
性能要求
1、精确度:在车寻线的过程中,不能偏离盲道,应准确的按盲道走。
2、稳定性:在导盲的过程中,不能轻易的发生死机。
3、安全性:在遇到危险的时候,能及时报警。
4、低功耗:AVR单片机在低功耗的方面是做的非常优秀的。选择AVR MCU可以实现低功耗的性能要求。
方案设计

图2:系统功能实现原理
系统硬件结构框图
说明:上电之后,CPU开始工作。首先,CPU开始控制摄像头和传感器同时工作,同时采集信息,把采集回来的信息进行分析,在CPU内部进行A/D或D/A转换,然后将转换后的信息传递给舵机,使舵机在CPU的控制下进行工作。
硬件平台选用及资源配置
运用EVK1100开发板进行前期开发
系统软件流程

图3:程序运行流程图
说明:A1无弯道,A2有弯道
B1无障碍物,B2有障碍物
C1拐弯,C2有障碍物
系统预计实现结果
本设计最终产品能够安全地指引盲人在盲道行走。它能够安全精确地寻找盲道并按照盲道行走以指引盲人行走。当遇到障碍物的时候,能够发出警报提醒盲人前方有障碍物,及时躲避。当盲人向其发出定位指令时,能够运用GPS模块,快速告知盲人具体位置。
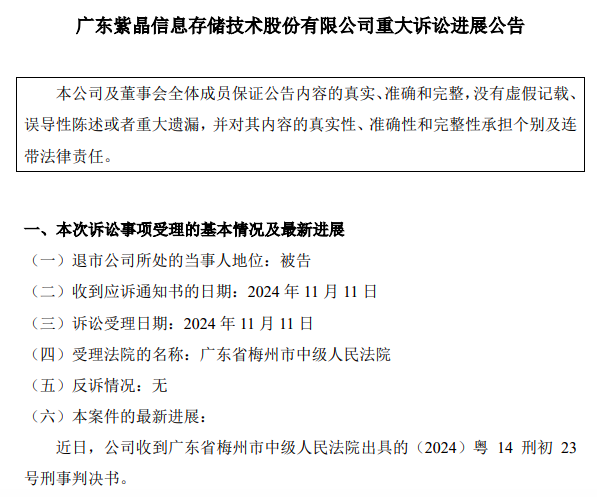
紫晶存储犯欺诈发行证券罪,判处罚金人民币3700万元;公司实际控制人郑穆、罗铁威及原财务总监李燕霞等10名核心管理人员,全部被判处有期徒刑,刑期最高达七年六个月。

近日,日产汽车和总部位于英国的自动驾驶初创公司Wayve签署协议,合作开发基于人工智能的驾驶辅助系统。

京东开启招聘存算一体芯片设计工程师计划,薪酬高达“40K-100K*20薪”

日本芯片制造商铠侠(Kioxia)计划于2026年在其岩手县晶圆厂开始生产新一代NAND闪存芯片。

一系列诉讼指控芯片制造商英特尔、AMD及德州仪器公司,未能有效阻止其技术被用于俄罗斯制造的武器。



