发布时间:2016-10-10 阅读量:4678 来源: 我爱方案网 作者: jiangliu
李工表示自己之所以会选择在快包平台接包完全是出于兴趣,他喜欢做电机控制,在大学时代,李工就已独立开始完成各种小型项目开发,这种兴趣到现在还未停止。在聊到他最得意的作品时,这位年轻的工程师兴奋的向读者展示了近期他为自己的侄子做的一个DIY设计:用有刷电调实现遥控汽车的变速控制。
遥控汽车之前是用继电器控制前进和后退的,速度始终处于定数状态,而电源也就使用4节1.5V的电池。喜欢玩模型的他就想更换成功率更大的锂电池,这就必须使用更大功率的电机,于是他想到了用有刷电调控制遥控汽车的正反转速,实现汽车的变速控制。经过沟通,这位快包优质服务商爽快的答应将此款DIY设计无条件公布,为更有想法的其他工程师提供参考。以下,笔者将为大家详细介绍这款DIY设计方案的原理以及制作过程!


图1中最右面的是天地飞4通道遥控器,左边发红光的是这个遥控器对应的接收机。锂电池在接收机上方,并且正在给电机控制器供电!电机控制器里有稳压芯片。可以把两三节串联的锂电池电压经过转换、稳压,转换成5V的电压供应给接收机。接收机的4个通道分别由右边4个摇杆控制。当你改变某个摇杆的位置时,对应通道的输出也会发生改变。程序通过读取连接在接收机那个通道的脉宽,相应改变PWM的高电平脉冲波长,来实现转数控制。

关于如何控制转速,李工解释到,接收机输出的信号是1~2ms脉宽的PWM(脉宽调制)波形,1~2ms的脉冲是高电平。而PWM信号每过20ms(50Hz)更新一下新的信号。这样,先通过读取接收机的信号脉冲宽度,再控制好相对应的电机的导通时间,就能控制转速了。
李工表示,电机转数的控制,实际就是功率输出的控制。单片机的PWM输出和场效应管的栅极(G)连接。在程序中,通过调整NMOS管的占空比,来实现功率的增加或减少。这相当于在重复的时间片段内,调整了输出的5V电压占用的时间比例。占用比例大了,做功的时间就长,电机转数自然就提升了。

MOS管分为增强型和耗尽型,它们的最大区别在于默认的导通状态。增强型只有在“G”极有相对电压时才会导通。而耗尽型在“G”极没有相对电压时就已经处于导通状态。这次的制作使用的都是增强型MOS管,并且使用了PMOS和NMOS两种型号。PMOS在“G”极电压为0时导通,为“VCC”电压时截止。而NMOS在“G”极电压为0时截止,为“VCC”电压时导通。



焊接好剩下的电阻以及舵机插头。最后,用4条绝缘导线连接4个MOS管的“G”极到单片机的引脚上。最后用螺丝刀把JST插头连接到2PIN的电气插座上。然后李工用万用表测试了一下焊接有没有短路或断路。等检查完毕,下载程序。一切OK后,理工细心的用热熔胶固定容易折损的部位,DIY制作部分就完成啦!

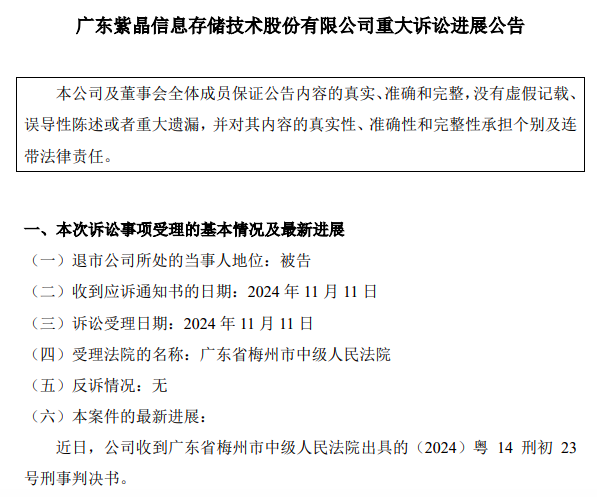
紫晶存储犯欺诈发行证券罪,判处罚金人民币3700万元;公司实际控制人郑穆、罗铁威及原财务总监李燕霞等10名核心管理人员,全部被判处有期徒刑,刑期最高达七年六个月。

近日,日产汽车和总部位于英国的自动驾驶初创公司Wayve签署协议,合作开发基于人工智能的驾驶辅助系统。

京东开启招聘存算一体芯片设计工程师计划,薪酬高达“40K-100K*20薪”

日本芯片制造商铠侠(Kioxia)计划于2026年在其岩手县晶圆厂开始生产新一代NAND闪存芯片。

一系列诉讼指控芯片制造商英特尔、AMD及德州仪器公司,未能有效阻止其技术被用于俄罗斯制造的武器。



