发布时间:2017-11-18 阅读量:2282 来源: 我爱方案网 作者: candytang
对大多数电气工程师而言,“电动机”是指电磁旋转运动单元。当需要线性运动而不是旋转运动时,工程师会考虑添加机械转换装置或者使用线性感应马达。然而,由于控制、公差、反向间隙等电气和机械问题,传统的电磁马达通常不能提供直线运动所需要的高精确(无论是转子马达、线性马达,不论是大是小)。幸运的是,目前有了一个可行的替代方案——压电马达,它广泛应用于需要精确控制的微小直线运动中。

压电马达概览
这种迷人的、非常规的马达理论基础是众所周知并广泛应用的压电效应。这是一种对称的机电关系,具有这种效应的晶体材料受到机械应力(挤压)时,就会产生电压;相反的,当施加电压到这种晶体时,材料会有很小的膨胀。这种压电性能在经典晶体振荡器中取得了巨大的成功,这种振荡器是近100年来时钟源的基础(尽管近年来替代品MEMS基振荡器势头强劲)。
在压电马达中,通过在材料上施加电压,产生电场,材料发生轻微地延伸。对于典型的电压,其形变量约为0.01%到0.1%。这些马达很小,这也是他们的优点之一,每个典型装置的尺寸约为10mm。它们所产生的形变是微米量级的,但是所产生的力却是牛顿量级的。通过堆叠多个压电晶体,可以实现更大的承受力和伸长率。
有两种使用方式可以实现物理的伸长。
第一种
其中一种方式是,压电材料交替地夹持,然后由一组微小的基于压电的夹具释放,从而允许晶体向前移动(适当地称为蚯蚓模式),如图1所示。

图1:只要夹紧和松开时机合适,马达就可以类似于蚯蚓(1壳,2移动晶体,3锁定晶体,4旋转部件)一样以微小增量向前移动
第二种
或者,可以固定晶体的一端,同时在另一端施加/移除电压,就能形成活塞或滑动运动(图2)。虽然压电马达主要用于线性运动,但如果把多个压电马达排布成圆形的阵列,也可以进行旋转运动。

图2:只需把其中一端固定就位,压电马达就能成为一个精确、高度可控的活塞
压电式运动可以应用在注入泵,显微镜台,光学定位,仪器仪表,喷墨喷嘴等方面。廉价的低品质压电装置可应用于扬声器,报警器,甚至是小型扩音器等,但是这些用途具仅要求较低的性能。压电马达可以以数千赫兹的频率运动(传统的电驱动马达无法达到),并且快速,精确,可控。此外,它们没有轴承,不需要使用可能引起污染的润滑剂,因此整个系统非常洁净。它们的非金属材质在许多情况下也是有利的(甚至可能是必需的,比如在核磁共振仪中)。
驱动-大有不同
与电磁马达一样,一个完整且可用的压电马达组件由三部分组成:电子驱动器,电气机械传感器(马达)本身和输出连杆。本文将专注于电子驱动系统部分。
驱动电磁马达时,需要利用功率半导体器件(MOSFET或IGBT)来控制拉电流和灌电流进入电磁线圈。驱动器在正确的时间以适当的转换速率打开和关闭功率半导体,以控制电流灌/拉到高感性负载中。MOSFET或IGBT输出级需要施加电压以控制电流,但为马达线圈提供电磁力的其实是电流。
对于压电马达,情况是迥异的。马达驱动器上需要施加高电压来提供电场,电流反而是次要因素了。因此,压电驱动是电磁驱动的补充。电磁驱动中电流是主体,电压是附属,而压电驱动时,电压是主体,电流是附属。压电驱动器必须将电压(而非电流)提供给容性(而非感性)负载,并且必须控制并调节该电压以控制晶体的伸长量。换言之,常规马达中电流是独立参数,电压是受控参数,但对于压电马达,情况恰恰相反。
压电电动机所需的电压(和电流)取决于压电元件的尺寸,预期的伸长率和运动速率。在低压时,电压和电流值分别可达20-30V和10-30mA,但是大多数更高性能的压电单元至少需要10V和10到几百毫安,甚至还有使用1,000V甚至更高电压的压电电动机,其电流可达几安培。
对于电气设计的挑战是,需要在中等电流的前提下提供高电压。此外,压电驱动器必须在带有可达1,000pF (1nF)的高电容负载时保持稳定。由于压电器件是浮动差分器件,大多数应用需要差分双极驱动器输出。
一个重要的设计注意事项:
由于这些马达在较高的电压下工作,所以要注意用户安全,物理隔离和电压保护等问题。设计需要符合最小爬电距离和间隙尺寸的规则要求(它们是电压电平的函数)。因此,压电马达的设计中除了要估计电气属性,还必须关注布线和环境条件。还要注意,高电压和适中的电流并不是压电器件的特有要求,许多科研级甚至商业级产品都有此类要求,如霓虹灯,特殊真空管,静电计和光学设备等等。
驱动的选择
大多数放大器集成电路都是低电压器件,而高电压器件通常会针对MOSFET / IGBT所需的驱动电流(而不是电压)进行优化设计,因此开发和提供压电驱动器所需高电压往往是一个难点。有些专用运算放大器(op amps)使用高压集成电路处理器满足高电压强电流的要求以适配压电驱动的设计,或者在输出端有低压运放结合升压晶体管组合的设计。
原则上,用高额定电压的晶体管构建基本的高压驱动器(图3)是可行的。然而,这种设计缺乏精度、可控性和稳定性,它还缺乏故障模式的保护。此外,它不能提供双极性输出,其基极电路驱动还需要专门设计合适的电路。因此,这种类型的基本设计更适合于低端应用,如压电报警器和发声器。

图3:虽然压电元件可以由基本晶体管控制,但该设计仅仅适用于较为低端的应用,例如基于压电的扬声器
幸运的是,供应商已经开发出专门为压电驱动设计的IC(集成电路),简化任务的同时增加了其它有用的特性和功能,包括高压波形转换控制。这些IC还提供热、过载和短路保护,这些特性在实际设计中是必不可少的。
ADI公司产品
例如,AD公司的ADA4700-1是一种高电压精密放大器,工作电压范围较宽(±5至±50V)。虽然这款八引脚SOIC(小外形集成电路封装)器件看起来像一个标准的运放,但它经过了优化,可稳定地以高电压转换速率给容性负载供电,如图4所示。它具有多种工作条件(各种电压,负载,温度,失真水平和过冲等),并且提供在不同使用场景下,60余张图表和数据供参考。

图4:ADA4700-1高压精密放大器具有精密的压摆率(电压转换速率)性能,数据手册中详细介绍了其他属性
ADA4700-1在驱动容性负载时稳定且超调量很小。驱动较大容性负载时可提供额外的补偿以增强响应,不过这需要添加一个小的缓冲电路,如图5所示;对于单位增益应用和高达1nF(1,000pF)的容性负载,需要150Ω电阻和10nF电容的组合。对于10nF的更大负载和更高增益,如十倍,电阻降低到22Ω,而电容增加到100nF。通过添加一对互补(PNP / NPN)晶体管可以提高驱动电流电平(图6)。

图5:为驱动高容性负载,在ADA4700-1外部添加了一个简单的外部RC缓冲器电路

图6:如果需要额外的电流输出,ADA4700-1外部需添加一对PNP/NPN晶体管
TI公司产品
德州仪器公司提供非常适配压电式负载的设备。其集成升压转换器的DRV8662压电触觉驱动器功能全面,包括105V升压开关(图7),但它只需要3.0到5.5V的电源进行供电。它使用两个外部电阻设置升压电压,使用两条I / O线可设置四种增益倍率。

图7:DRV8662是一款针对触觉应用的压电驱动器,仅靠单数字电源可提供超过100V的电压
它可驱动多种器件。例如,在300Hz时,可以用200VPP驱动100nF负载,用150VPP驱动150nF负载,用100VPP驱动330nF负载,用50VPP驱动680nF负载。尽管其内部较为复杂,但其外部是一个二十引脚的4×4mm QFN(方形扁平无引脚封装)。它使用简单,连接方式如图所示(图8)。

图8:尽管其内部设计较为复杂,DRV8662仅需要简单的外围电路就可实现基本功能
Microchip公司产品
除了基本的数据手册外,一些压电IC的供应商已经不仅仅提供IC及其基本的支持文档,同时也提供详细的参考设计。例如,Microchip Technology为压电马达流体微泵提供了完整的参考设计。该设计包括框图(图9),流程图,代码,原理图和布线布局,还包括了充电器,微控制器和其他组件的低压电源子系统和压电驱动器的高压驱动部分。

图9:除了基本的数据手册外,Microchip公司同时也提供详细的参考设计。比如,其提供了一个由压电马达控制的液体微型泵的完整的设计和内部软件
该设计中,高压部分使用一对IC(图10),并能够以300Hz的最大频率提供250VPP的电压。该设计基于HV913高压驱动器和HV9150 DC / DC升压转换器。升压转换器将低压轨从可充电电池转换为250V,然后将其用于IC驱动压电微型泵。驱动器IC提供单极推挽输出的高电压。控制器IC产生一系列脉冲以驱动压电元件。其设计不仅仅停留在纸面,而是可实际构建和测试的(图11)。

图10:除了传统的低压部分外,该设计还采用双集成电路方式将设计的低压轨升压至250V,以满足压电泵所需电压值
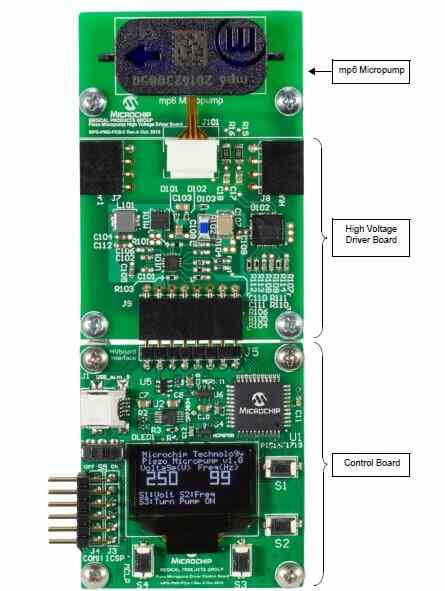
图11:压电微泵控制器是一个内置并经过测试的单元,数据手册提供了许多波形细节和测试代码
总结
当需要实现微小的直线运动以及精密控制时,选择压电马达去控制精密微小运动是很合适的。压电马达可以代替磁转子马达和线性马达,并且压电马达的许多参数可以控制和调整,这使得它们在特定的使用环境下有普通马达不可比拟的优势。由于其高电压(而不是电流)的驱动要求,还有容性(而不是感性)负载的特点,其驱动要求与电磁马达不同。
标准运算放大器与外部升压晶体管一起使用,可在提供高电压的同时满足电流要求。然而,IC供应商的器件针对驱动压电元件进行过优化,增添了额外的功能,比如更好地控制输出驱动、过热保护和其他断电保护、短路保护等等,从而简化了设计,同时增强了其性能。

近日,日产汽车和总部位于英国的自动驾驶初创公司Wayve签署协议,合作开发基于人工智能的驾驶辅助系统。

京东开启招聘存算一体芯片设计工程师计划,薪酬高达“40K-100K*20薪”

日本芯片制造商铠侠(Kioxia)计划于2026年在其岩手县晶圆厂开始生产新一代NAND闪存芯片。

一系列诉讼指控芯片制造商英特尔、AMD及德州仪器公司,未能有效阻止其技术被用于俄罗斯制造的武器。

台积电日本子公司JASM熊本第二晶圆厂在 10 月下旬启动后近期处于暂停状态,重型设备已撤出工地



