发布时间:2018-10-11 阅读量:946 来源: 发布人:

传统的滤波方法,只能是在有用信号与噪声具有不同频带的条件下才能实现.20世纪40年代,N.维纳和A.H.柯尔莫哥罗夫把信号和噪声的统计性质引进了滤波理论,在假设信号和噪声都是平稳过程的条件下,利用最优化方法对信号真值进行估计,达到滤波目的,从而在概念上与传统的滤波方法联系起来,被称为维纳滤波。这种方法要求信号和噪声都必须是以平稳过程为条件。60年代初,卡尔曼和布塞发表了一篇重要的论文《线性滤波和预测 理论的新成果》,提出了一种新的线性滤波和预测理由论,被称之为卡尔曼滤波。特点是在线性状态空间表示的基础上对有噪声的输入和观测信号进行处理,求取系统状态或真实信号。

卡尔曼滤波不要求信号和噪声都是平稳过程的假设条件。对于每个时刻的系统扰动和观测误差(即噪声),只要对它们的统计性质作某些适当的假定,通过对含有噪声的观测信号进行处理,就能在平均的意义上,求得误差为最小的真实信号的估计值。因此,自从卡尔曼滤波理论问世以来,在通信系统、电力系统、航空航天、环境污染控制、工业控制、雷达信号处理等许多部门都得到了应用,取得了许多成功应用的成果。
按晶振的功能和实现技术的不同,分为温度补偿晶振(TCXO)、压控晶振(VCXO)、恒温晶振(OCXO)。
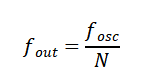
为了在性能与功耗之间取得最佳平衡,需要根据具体应用场景,对基准时钟进行相应的分频、倍频或转换处理,从而为各模块提供适宜的时钟信号。此时,分频技术就成为连接晶振基准频率与系统需求的关键,通过数字电路将晶振原始频率按固定比例降低,输出符合要求的低频时钟信号。
RTC芯片是一种专门用于精准计时、掉电续时的专用集成电路,其核心功能是提供精准、稳定的时间信息(包括秒、分、时、日、月、周、年),并能在主电源断电后依靠备用电池继续保持计时,从而确保时间持续不间断。

晶振的启动时间,通常是指其通电后进入稳定振荡状态所需的时间。若启动时间过长,可从以下五个常见的影响因素方面进行优化。

RTC(Real-Time Clock,实时时钟)芯片作为一种独立的专用计时器件,其核心功能包括提供稳定的日历时钟、在主电源断电后持续运行、支持定时中断以及输出高精度时间戳,为各类嵌入式系统提供可靠的时间基准。



