发布时间:2025-01-16 阅读量:2144 来源: 我爱方案网 作者: bebop
摘要:由于机器人关节驱动对于其PCBA体积敏感,所以其采用芯片多为较小封装,且电机驱动通常设计为一板拖多电机的形式,这对于MCU的处理能力会有较大的要求,一般要求其具有主频150MHZ以上的算力。针对需求日益高涨的机器人市场,我爱方案网平台推荐机器人关节电机的专用控制系列芯片先楫HPM6E8Y,主频600MHz,集成2个以太网PHY收发器,内置4M flash,支持EtherCAT从控制器,满足机器人控制实时响应通信需求及小型化应用。
扫码可申请免费样片以及获取产品技术规格书
快速验证方案 先楫半导体提供机器人关节伺服演示系统方案,助力芯片快速验证进程。 该方案的特点: 内置HPM6E8Y芯片 支持CiA402(CSV,CSP) 支持FOE(OTA) S曲线 保护功能:过流,过压,欠压,过温,飞车,编码器断线 支持hpm_monitor_studio
扫码可申请免费样片以及获取产品技术规格书


在边缘计算场景中,算力与实时性的平衡始终是技术演进的核心课题。
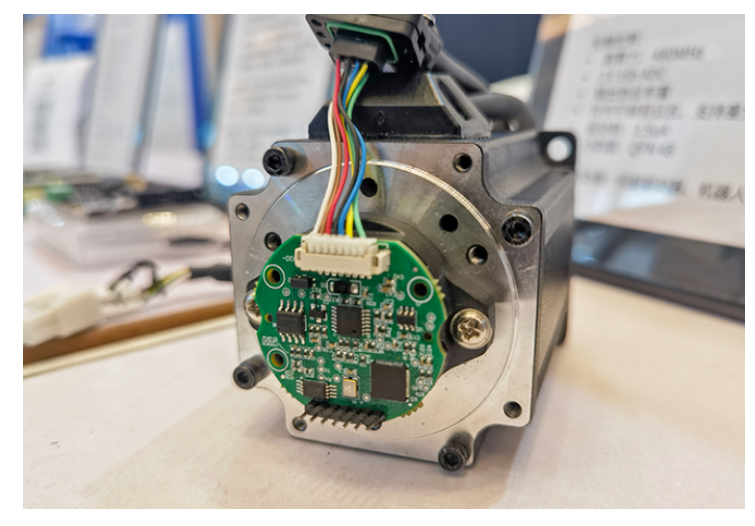
磁电式编码器消除了易损的光学部件和复杂的绕组结构,其固态设计带来了更长的平均无故障时间(MTBF)与更低的生命周期维护成本。

EtherCAT 网络可连接多达 65535 个设备,网络容量几乎没有限制,可以将模块化的 I/O 设备设计为每个 I/O 片都是一个独立的 EtherCAT 从站
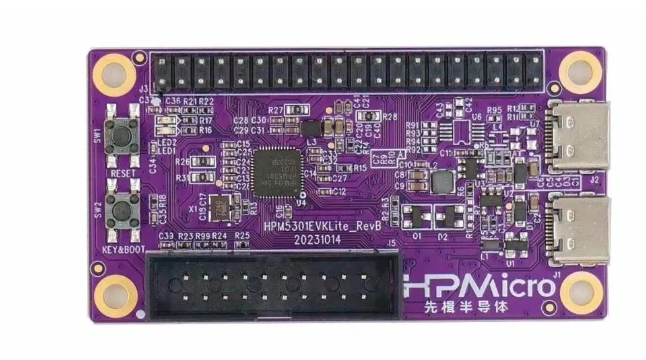
先楫HPM5301秉承了先楫半导体一贯的高性能特性及架构,在性能上做到了极大的突破。
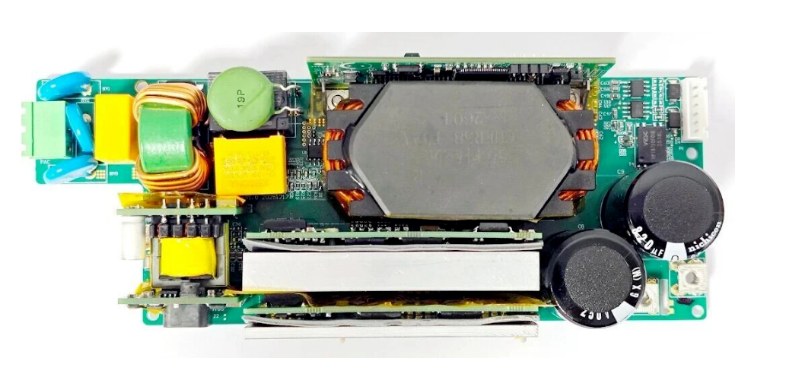
方案采用两相交错无桥图腾PFC拓扑,工作于CCM(连续导通模式),峰值效率>99%



