发布时间:2025-03-7 阅读量:3123 来源: 我爱方案网 作者: bebop
工业自动化领域,EtherCAT作为一种高效的工业以太网协议,以其出色的实时性能、灵活的拓扑结构和强大的扩展能力,成为众多伺服驱动与步进驱动产品研发的首选。
我爱方案网配合原厂生态,推荐基于HPM6E00开发的全套伺服驱动器整机方案,方案整套代码开源可交付,更方便工程师设计开发相应方案。
先楫HPM6E00伺服驱动器支持单相AC~90V- AC~253V 电源供电,配合100W~750W 高响应伺服电机(电机搭配17位绝对值编码器),实现全闭环功能,电机运行安静平稳。该方案支持适配电机、支持EtherCAT总线控制,支持DI输入和DO输出,具备过流、过压、过载等保护。该方案应用于电子制造、锂电、机械手、包装、机床等行业的自动化设备,以其高性能实现快速精确的位置控制、速度控制和转矩控制,提高系统的响应速度和生产效率。
方案硬件结构:
EtherCAT 高压驱动器是先楫研制的高性能中小功率的直流伺服产品。该系列产品支持的功率范围为 100W~750W,采用以太网通讯接口,支持 EtherCAT 通讯协议,配合上位机可实现多台伺服驱动器联网运行。
电路设计包含电源模块,通讯模块,电机控制模块。
电源模块:将 AC220V 整流成 DC310V 提供给电机驱动模块。
通讯模块:负责 EtherCAT 通讯,菜单控制交互,调试交互
电机控制模块:负责电机驱动, 电机电流采样 ,母线电压采样,编码器读取,故障保护。
电机架构


在边缘计算场景中,算力与实时性的平衡始终是技术演进的核心课题。
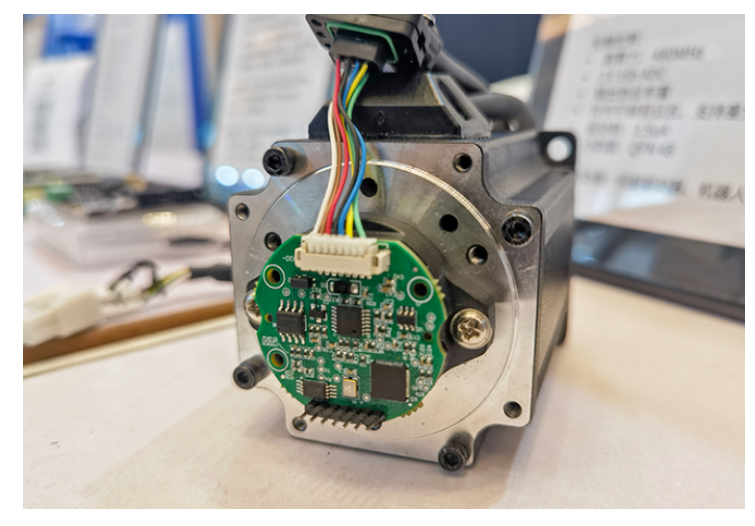
磁电式编码器消除了易损的光学部件和复杂的绕组结构,其固态设计带来了更长的平均无故障时间(MTBF)与更低的生命周期维护成本。

EtherCAT 网络可连接多达 65535 个设备,网络容量几乎没有限制,可以将模块化的 I/O 设备设计为每个 I/O 片都是一个独立的 EtherCAT 从站
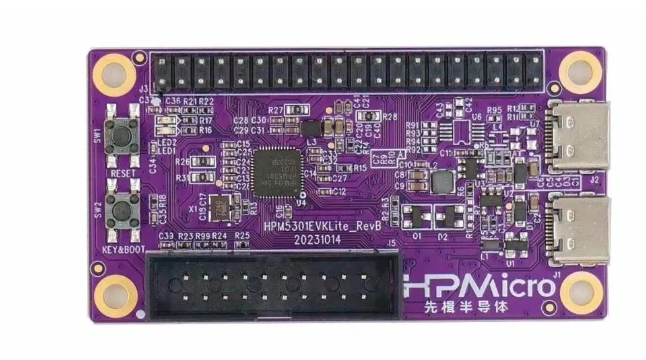
先楫HPM5301秉承了先楫半导体一贯的高性能特性及架构,在性能上做到了极大的突破。
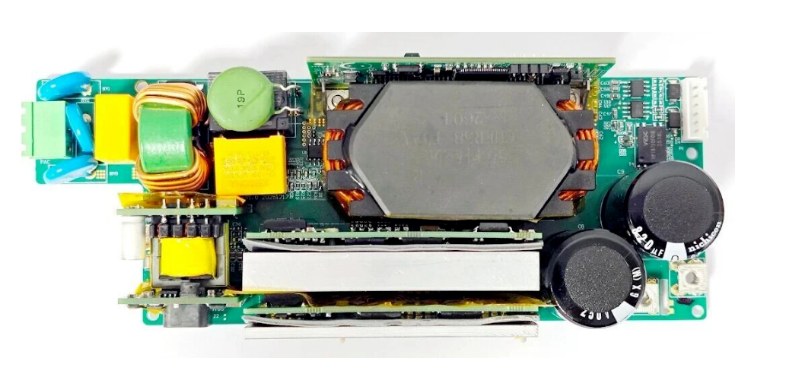
方案采用两相交错无桥图腾PFC拓扑,工作于CCM(连续导通模式),峰值效率>99%



