发布时间:2025-09-11 阅读量:2233 来源: 发布人: suii
在科技飞速发展的浪潮中,人工智能与边缘计算不断深度融合,正以前所未有的力度与速度,重塑我们社会的运行方式与生活方式。RK3576芯片拥有4核Cortex-A72以及4核Cortex-A53提供基础算力,6TOPS算力NPU来模型推导运算。使用YOLOv8模型时也是手到擒来,接下来随着步伐看看它表现如何。
图:此次的板卡RK3576核心板开发板
YOLO简介
YOLO(You Only Look Once)是当前业界领先的实时目标检测算法系列,以其速度和精度的完美平衡而闻名。从它发布至今,经历了好几个版本变革,下图是它发展历史。
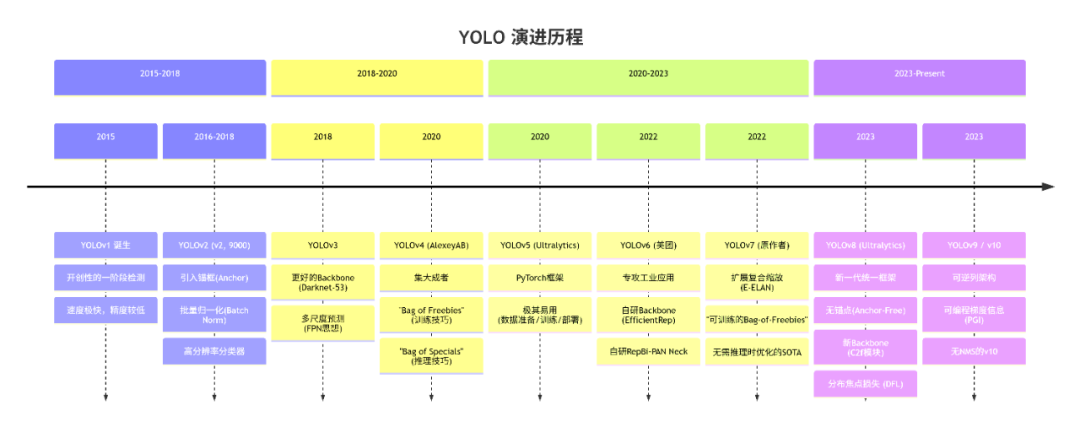
图1-1. YOLO版本发展史
YOLOv8在性能、易用性、架构现代性和生态之间取得了最佳的平衡,它是目前最全面,最省心选择。
同样YOLOv8也有很多尾缀,用一个表简单列一下它们分别代表什么意思:
表1-1.按任务类型区分
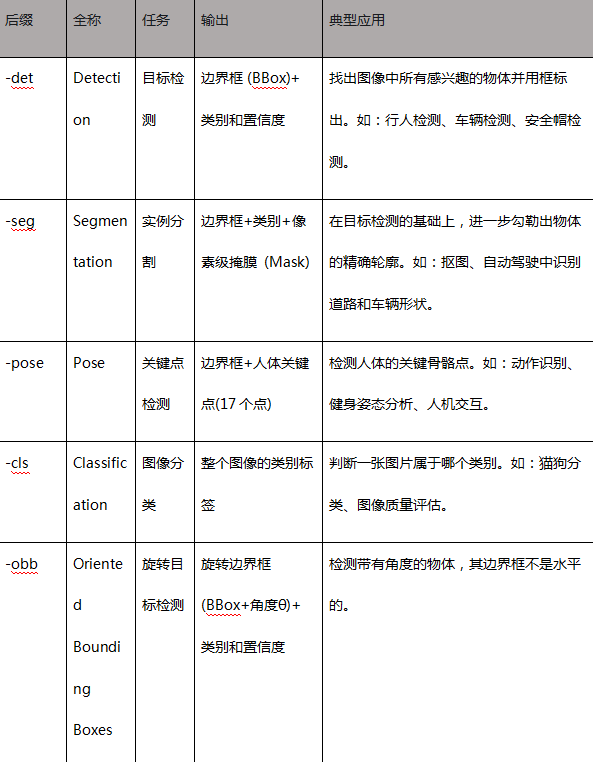
表1-2.按模型尺寸分
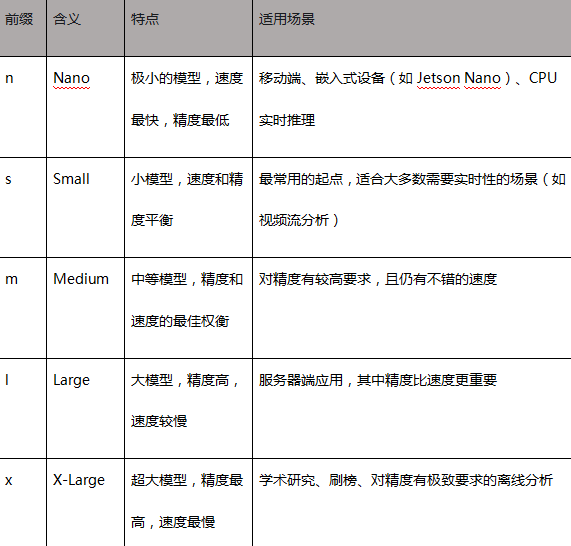
Demo模型选择
基于MYD-LR3576来说,选择s/n小模型相对合适,使用基础功能和-seg,-obb,-pos来演示。
单独测试视频场景效果展示
1.YOLOv8s.int 目标检测模型

2.YOLOv8s-seg.int 实例分割模型

3.YOLOv8s-pose.int 人体姿态估计模型

4.YOLOv8s-obb.float 旋转目标检测模型

上面已经看到了单独解析视频时,每一种模型效果,接下来演示MYD-LR3576通过4路摄像头同时推导效果。
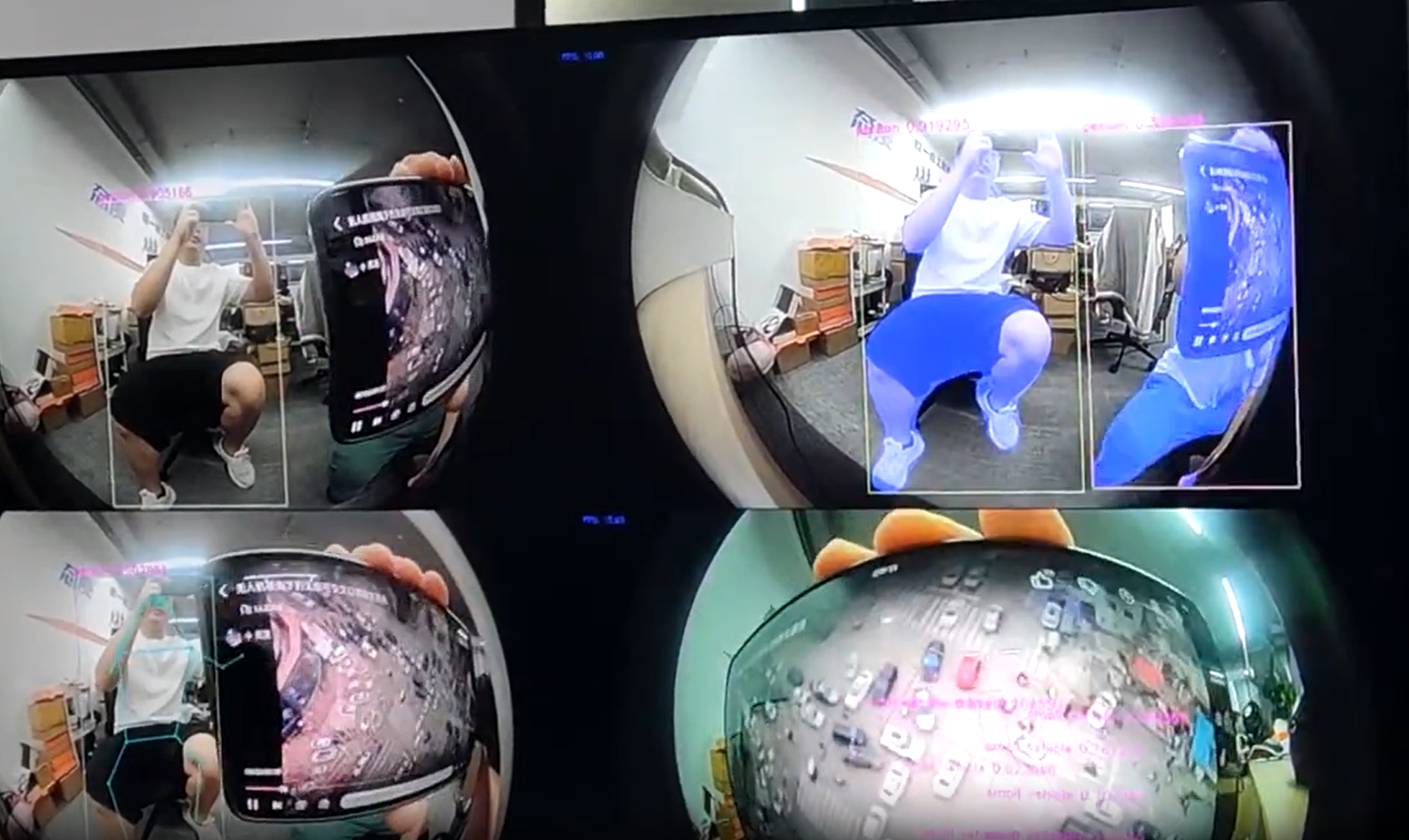
实现方式如下:
MYD-LR3576拥有3路MIPI-CSI接口,通过3个MY-CAM004M分别接入3路MIPI-CSI,采用2+1+1方式搭载4路AHD高清摄像头,摄像头采集的画面输出为H.264编码的RTSP码流,1920*1080分辨率,30帧。经过MYD-LR3576开发板处理后,单路视频输出1920*1080,25fps,4路视频加起来在60~70帧,cpu占用率接近100%,NPU综合利用率在50~60%。
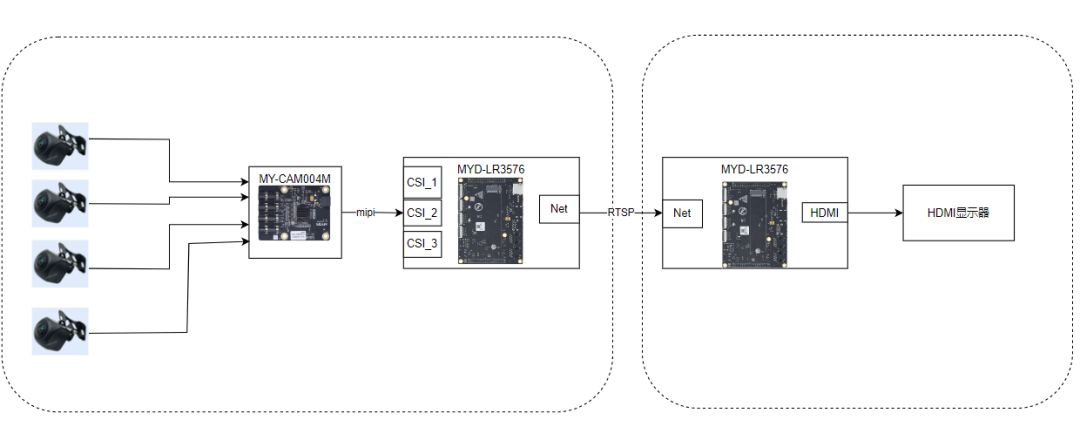
图1-2. 实物接线概要图
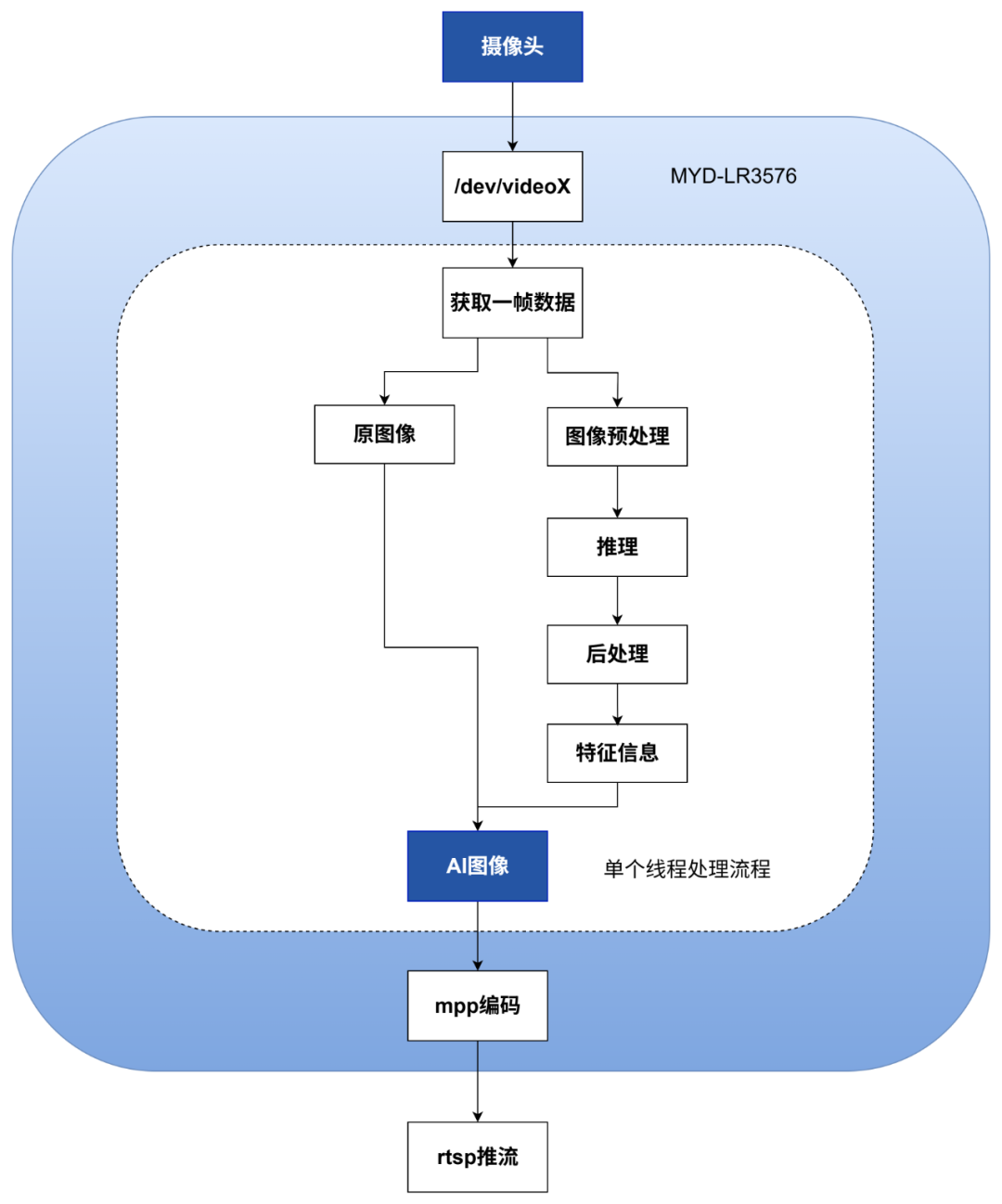
图1-3. 摄像头数据处理流程图
MYIR在程序中做了哪些优化
AI推导一轮流程
· 获取CSI一帧数据
· 裁剪数据到xxx*yyy较小图片
· 调用RKNN api处理
· 获取返回特征位置和相似度
· 对应放大到原始图片
· 增加方框和相似度值到原图
这样做后果是CPU利用率不高,视频采集帧数低,最后显示效果会卡顿。
采用线程池方案,将上述过程通过线程处理,充分利用4个A72和4个A53资源,同时采用RGA来做图片裁剪和放大。将CPU,GPU,NPU,VPU4个模块协同工作,资源最大限度开发使用。
总结:
RK3576 在运行 YOLOv8 模型方面表现卓越,为多领域应用提供了强大的技术支撑。在智能安防领域,该芯片可部署于机场、火车站、商场等公共场所的监控系统中,实时、精准地识别异常行为(如斗殴、奔跑等),并及时触发告警机制。同时,结合人脸识别技术,系统能够对进出人员实施身份核验,通过与数据库信息快速比对,实现对重点关注对象的动态监控与轨迹追踪。此外,RK3576 还可赋能智能机器人,赋予其高效的环境感知与实时响应能力,进一步提升智能化应用的交互水平与执行效率。

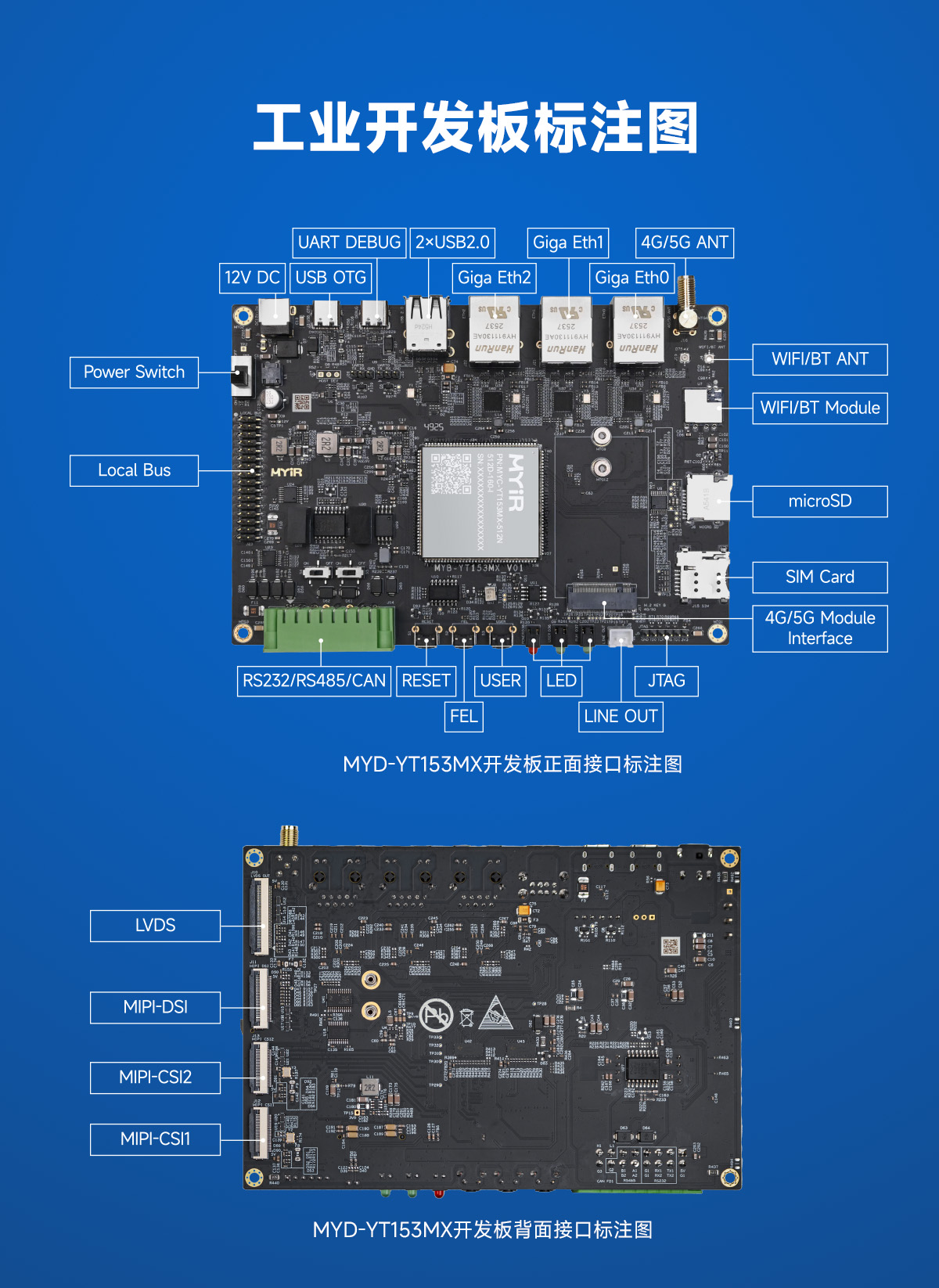
今年1月发布的MYD-YT153MX-MINI开发板精准切入国产核心板中端市场,以极致性价比获得了良好的市场反响。

随着智能家居的普及,扫地机器人已从随机碰撞清扫升级为具备路径规划、定时启动、分区清扫等智能功能的规划式清扫设备。这些核心功能的实现,均依赖于一个稳定可靠的时间基准——实时时钟芯片(RTC)。

我们推出的YSO171PS系列可编程展频振荡器(SSXO),凭借自主研发的频率调制技术,从源头化解EMI难题,为智慧诊疗设备提供稳如磐石的时序支撑。

我们依托在时钟频率器件领域的长期技术积累,打造了覆盖TCXO与OCXO系列的完整5G基站时钟解决方案,能够满足高精度同步与高可靠运行的网络需求,助力5G网络实现更优性能与更稳定服务。

京硅智能KSiC1并离网无缝切换开关方案,切换时间≤15ms(相当于1/4个交流周波),实现了真正的“无感知”无缝切换。



