发布时间:2025-12-17 阅读量:2457 来源: 我爱方案网 作者: bebop
在现代工业自动化、高端机器人及精密传动领域,对伺服驱动系统的要求日益严苛——不仅需要高功率输出应对重载启动与瞬时加速,更要在有限空间内实现精准、快速且稳定的运动控制。传统解决方案往往在功率密度、响应速度和集成度上面临瓶颈。
在此背景下,我爱方案网推荐基于机器人关节电机的专用控制系列芯片先楫HPM6E8Y开发的高爆发关节电机驱动模块,方案采用3kW大功率架构,不仅支持EtherCAT从控制器,还支持多达3个外部端口的时间敏感网络千兆以太网交换机,完美适配需要高精度运动控制和瞬时大扭矩输出的高端工业、机器人等场景。
扫码可申请免费样片以及获取产品技术规格书

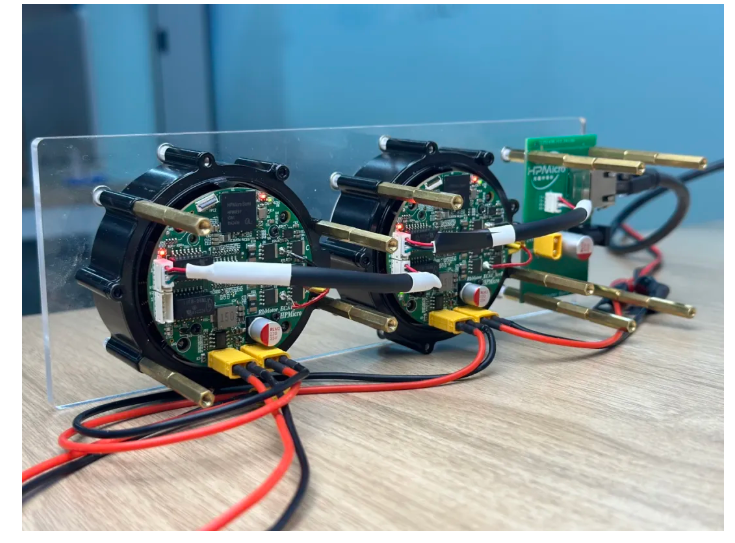
先楫HPM6E8Y高爆发关节电机驱动模块

方案采用3kW额定功率架构,支持48V-72V宽电压直流输入,额定电流40A,瞬态电流可达100A,瞬态功率提升至7kW。这一设计使其能够直接应对重载启动、高速急停、瞬时过载等严苛工况,适用于协作机器人关节、AGV驱动轮、高速CNC主轴等场景。
通信系统集成EtherCAT工业总线,支持微秒级响应与灵活拓扑组网。模块配备21位超高精度绝对值编码器,并结合位置、速度、力矩、零扭力等多种控制模式,特别针对突发瞬时负载工况开发“高爆发”控制算法,可短时输出2-3倍额定扭矩。
方案亮点:
· 电源:采用48V-72V直流电源输入,支持额定电流40A、瞬态电流100A,额定功率3kW,瞬态功率可达7kW;
· 处理器:高性能双核RISC-V处理器,主频高达600MHz;
· 驱动:搭载第三代半导体氮化镓驱动单元,具有高频、高效、耐高温、高功率密度等优势,满足小体积高功率应用需求;
· 通信:集成EtherCAT通信技术,实现微秒级实时响应,兼具低延时、高带宽与灵活组网特性,支持高效数据传感与交互;
· 编码器:配备2个21位高精度绝对值编码器,实现精准位置反馈;
· 性能:具备位置、速度、力矩、零扭力、阻尼及组合控制模式,支持“高爆发”动态运行工况。
先楫HPM6E8Y MCU介绍
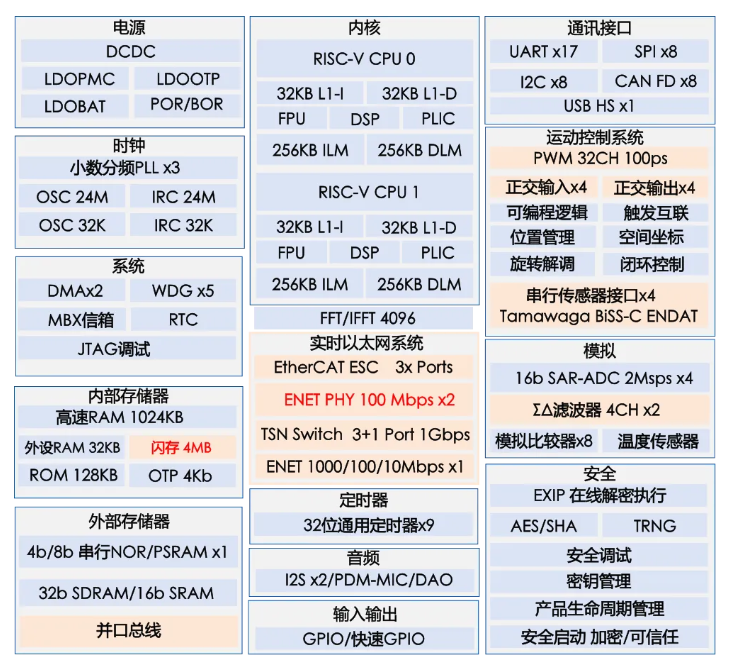
先楫HPM6E8Y内置:RISC-V双核,4M flash。更加简洁的电路设计,可减小控制板体积,适用于机器人各类关节电机及车轮电机,利于节约空间,便于集成化系统开发;6E8Y还集成了增加内置2个PHY,不仅支持EtherCAT从控制器(ESC: EtherCAT Slave Controller),还支持多达3个外部端口的时间敏感网络(TSN: Time Sensitive Networking)千兆以太网交换机,同时拥有32通道高分辨率PWM输出及∑∆数字滤波器,为高精度运动控制系统量身打造出色的硬件平台。
快速验证方案
先楫半导体提供机器人关节伺服演示系统方案,助力芯片快速验证进程。
该方案的特点:
内置HPM6E8Y芯片
支持CiA402(CSV,CSP)
支持FOE(OTA)
S曲线
保护功能:过流,过压,欠压,过温,飞车,编码器断线
支持hpm_monitor_studio
扫码可申请免费样片以及获取产品技术规格书


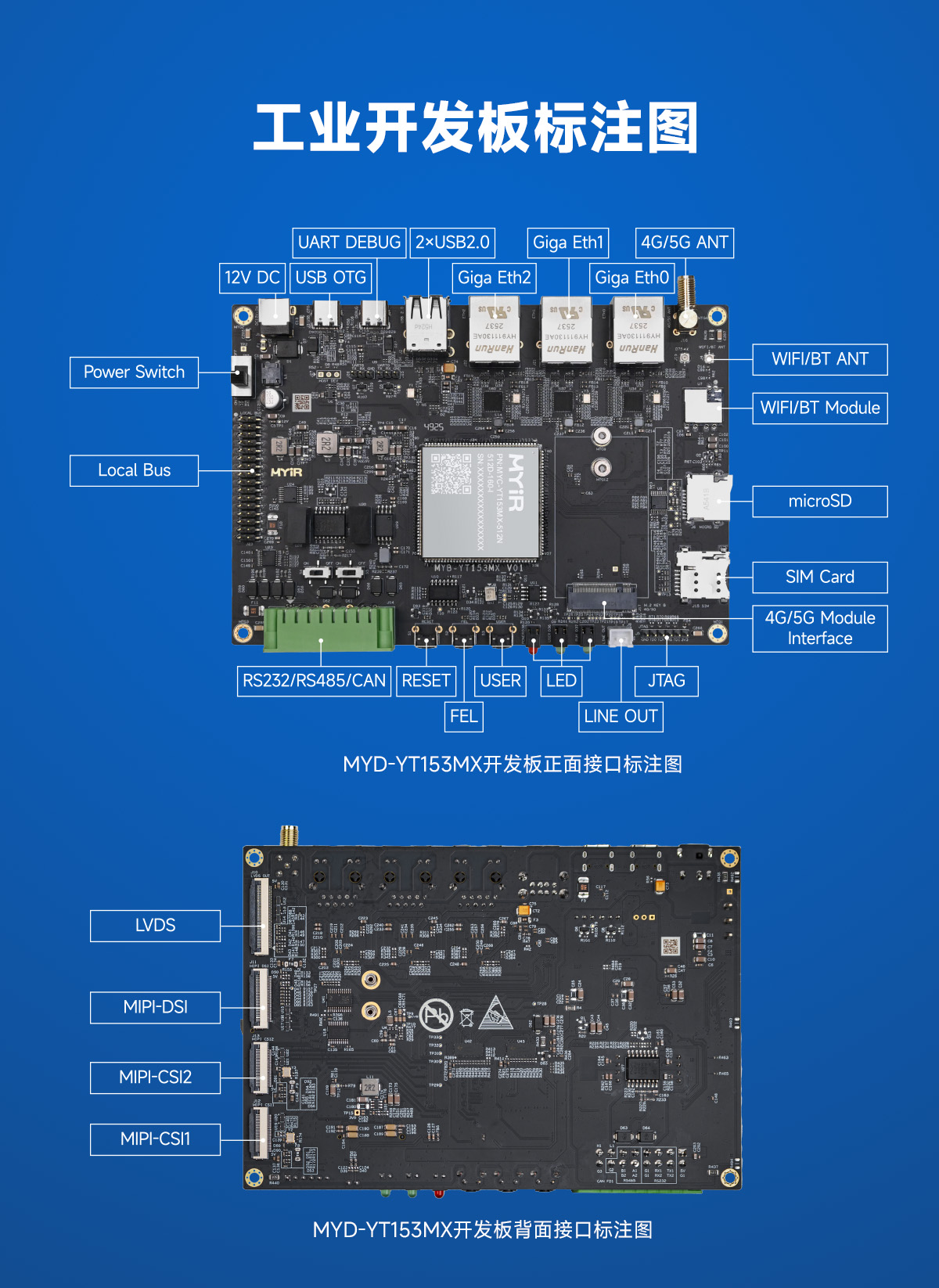
今年1月发布的MYD-YT153MX-MINI开发板精准切入国产核心板中端市场,以极致性价比获得了良好的市场反响。

随着智能家居的普及,扫地机器人已从随机碰撞清扫升级为具备路径规划、定时启动、分区清扫等智能功能的规划式清扫设备。这些核心功能的实现,均依赖于一个稳定可靠的时间基准——实时时钟芯片(RTC)。

我们推出的YSO171PS系列可编程展频振荡器(SSXO),凭借自主研发的频率调制技术,从源头化解EMI难题,为智慧诊疗设备提供稳如磐石的时序支撑。

我们依托在时钟频率器件领域的长期技术积累,打造了覆盖TCXO与OCXO系列的完整5G基站时钟解决方案,能够满足高精度同步与高可靠运行的网络需求,助力5G网络实现更优性能与更稳定服务。

京硅智能KSiC1并离网无缝切换开关方案,切换时间≤15ms(相当于1/4个交流周波),实现了真正的“无感知”无缝切换。



