发布时间:2026-01-15 阅读量:1061 来源: 发布人: suii
当RK3576凭借其四核A72与四核A53的强劲处理核心,结合GPU、VPU与NPU协同加速能力,正推动高性价比机器人开发进入新阶段。我们已成功将完整的Ubuntu 22.04系统及ROS2 Humble生态移植至此国产芯片平台,构建出稳定、全功能的机器人软件开发基础。现在,诚邀您一同探索其卓越性能与开放生态赋予机器人创新的更多可能!

一、系统启动与基础性能展示
1. 硬件平台简介
· 开发板:MYD-LR3576
· 存储:eMMC 64GB
· 内存:8GB LPDDR4
· 登录信息:root/123456 或 myir/123456
2. 系统基本信息
· 版本:Ubuntu 22.04.5 LTS
· 启动速度:HDMI 3秒显示Logo,25秒进入桌面
3. 资源占用实测
磁盘使用情况:

内存状态:

CPU负载情况:
8核CPU在空闲状态下利用率接近0%,系统响应迅速。
4. 桌面环境展示
默认搭载轻量级Xfce4桌面,简洁流畅。
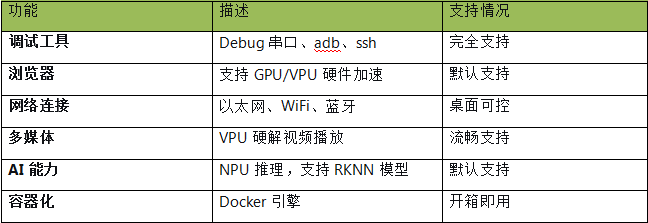
5. 系统功能介绍
二、ROS2核心功能测试
1. 环境验证

确认运行ROS2 Humble长期支持版,生态完整。
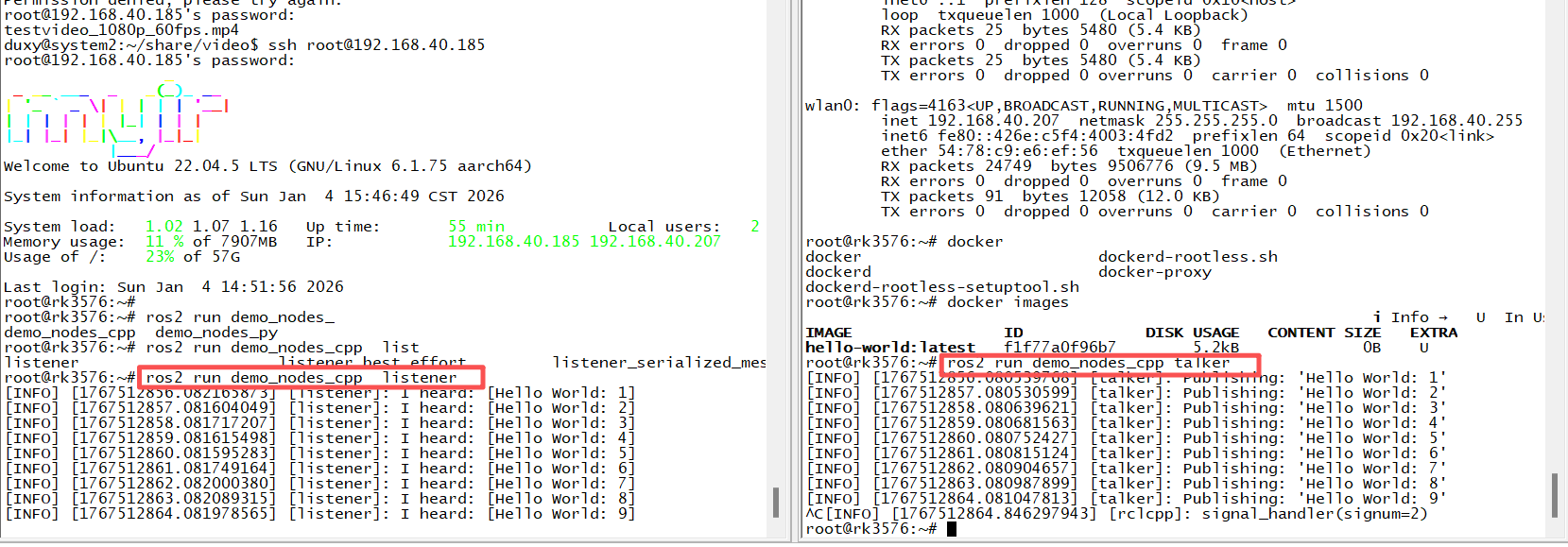
2. 通信测试
话题发布/订阅:C++与Python节点通信正常,跨终端交互流畅。
· 使用C++演示
左边窗口ssh登陆,订阅模式; 右边窗口debug连接,话题发布
· 使用Python演示

3. 性能表现

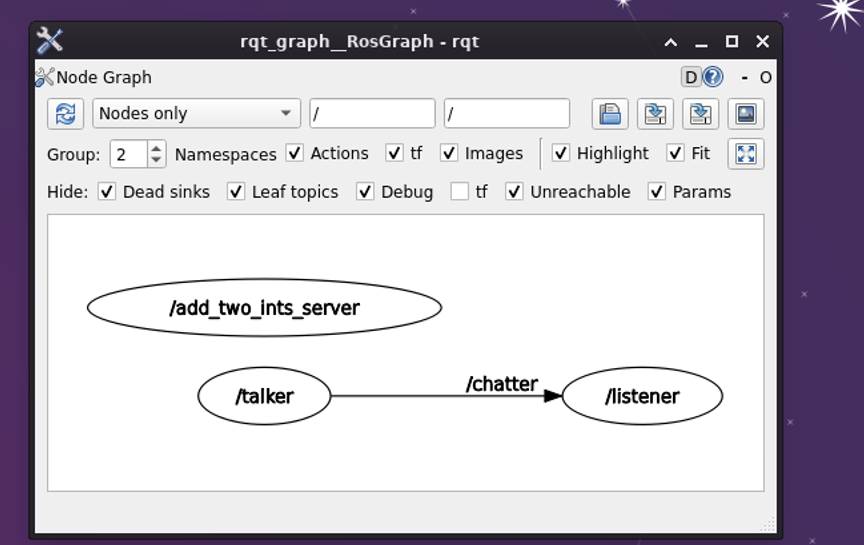
4. 可视化工具
rqt_graph:清晰展示节点拓扑,系统架构一目了然。
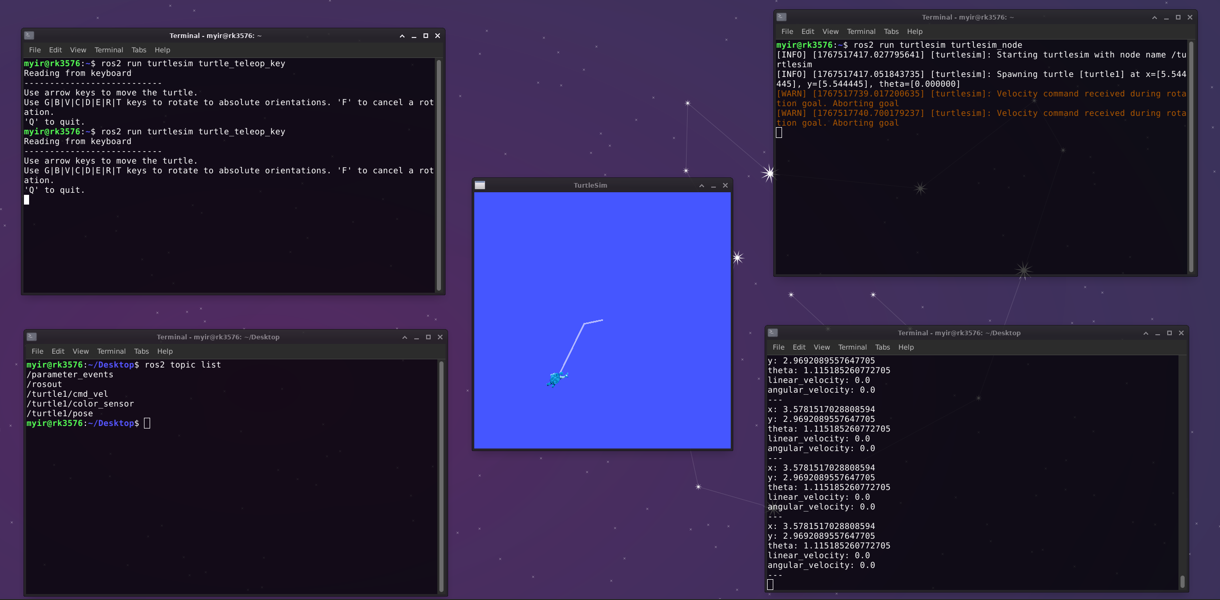
5.小乌龟-Turtlesim经典演示
终端1 启动”小乌龟”

终端2 开启 键盘控制

终端3 开启查看活跃话题

终端4 查看乌龟实时位置

三、RVIZ2三维可视化实战
1. 启动与界面
启动命令

界面
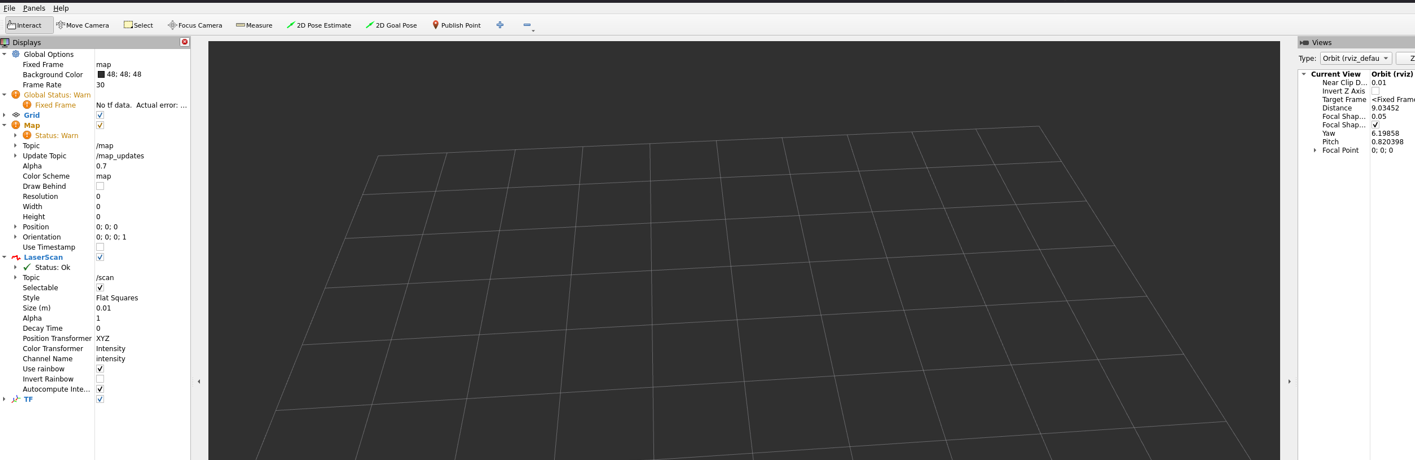
成功启动RVIZ2,界面加载完整,支持3D可视化交互。
2. 机器人模型加载

3. 性能实测
· 2K分辨率全屏:CPU占用约60%
· GPU负载:36%@700MHz
· 渲染体验:操作流畅,视角切换无卡顿
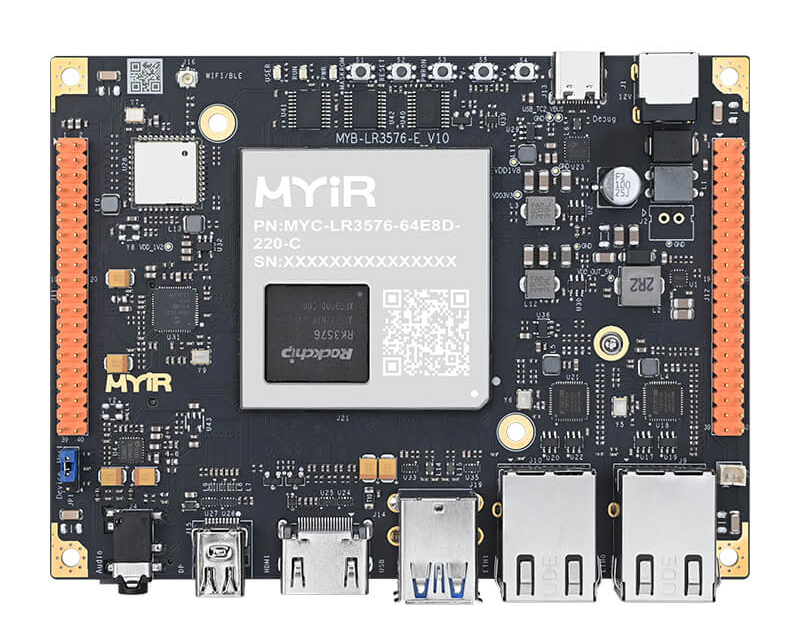
图:基于RK3576开发板
四、总结与展望
RK3576平台完全具备运行完整ROS2生态的能力,性能满足:
· 机器人算法开发与调试
· 三维可视化与仿真
· 多传感器数据融合处理
· 教育实验与原型验证
核心优势
1. 国产化价值:全链路自主可控,助力机器人领域国产替代
2. 成本优势:千元级开发板实现完整ROS2开发环境
3. 功耗表现:典型场景功耗优于同性能x86平台
4. 生态完整:Ubuntu + ROS2 + 丰富外设驱动
未来计划
· 进一步优化GPU驱动,提升3D渲染性能
· 集成SLAM、导航等实际机器人应用栈
· 推动在AGV、服务机器人等场景的落地应用
给开发者的建议
· 推荐场景:
· 高校机器人课程教学平台
· 机器人算法研究与原型验证
· 轻量级机器人产品开发
· 注意事项:
· 建议使用SSD或高速TF卡提升IO性能
· 复杂3D场景可适当降低渲染质量
· 多节点应用注意内存分配优化

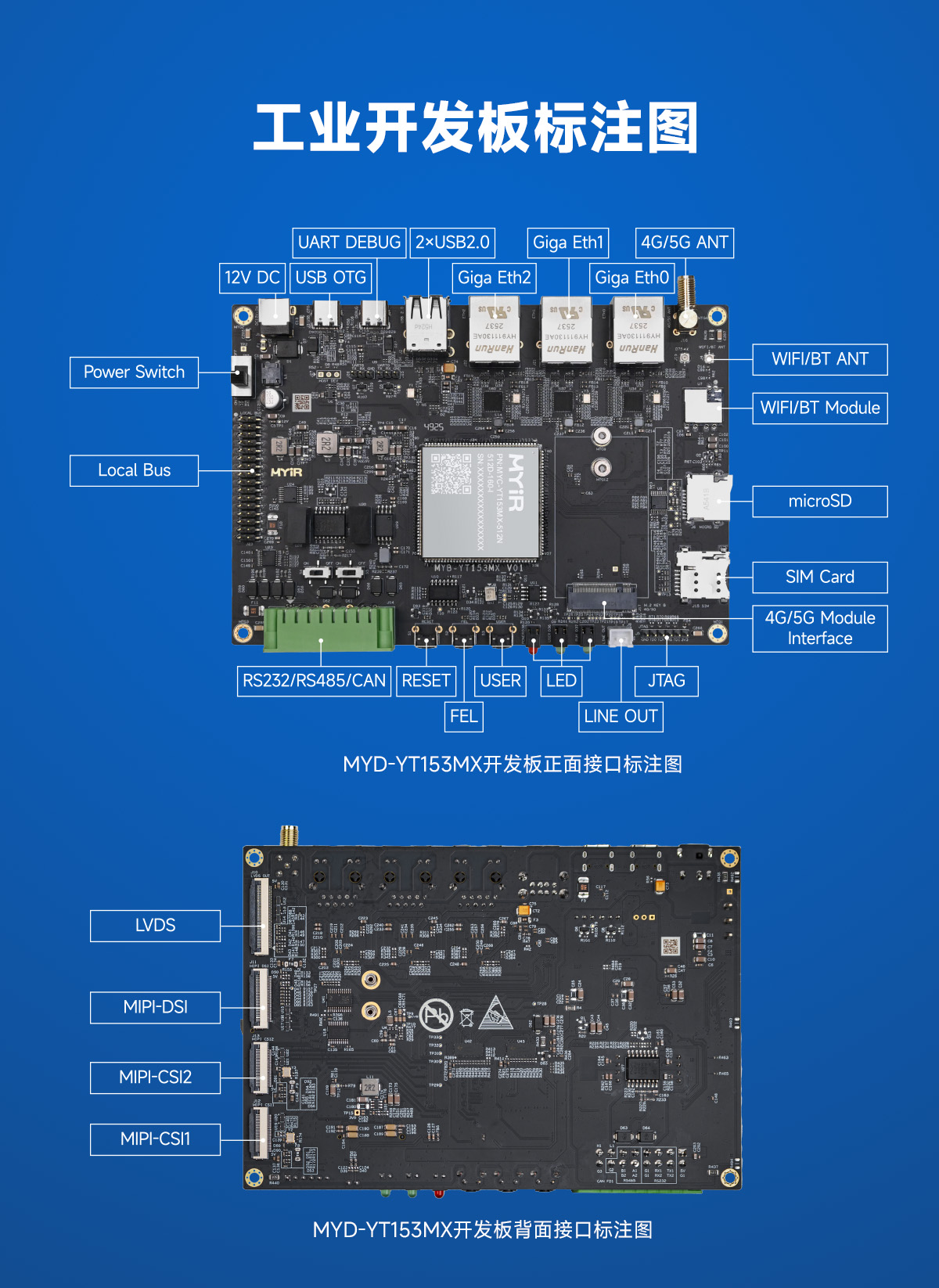
今年1月发布的MYD-YT153MX-MINI开发板精准切入国产核心板中端市场,以极致性价比获得了良好的市场反响。

随着智能家居的普及,扫地机器人已从随机碰撞清扫升级为具备路径规划、定时启动、分区清扫等智能功能的规划式清扫设备。这些核心功能的实现,均依赖于一个稳定可靠的时间基准——实时时钟芯片(RTC)。

我们推出的YSO171PS系列可编程展频振荡器(SSXO),凭借自主研发的频率调制技术,从源头化解EMI难题,为智慧诊疗设备提供稳如磐石的时序支撑。

我们依托在时钟频率器件领域的长期技术积累,打造了覆盖TCXO与OCXO系列的完整5G基站时钟解决方案,能够满足高精度同步与高可靠运行的网络需求,助力5G网络实现更优性能与更稳定服务。

京硅智能KSiC1并离网无缝切换开关方案,切换时间≤15ms(相当于1/4个交流周波),实现了真正的“无感知”无缝切换。



