发布时间:2026-02-4 阅读量:7264 来源: 我爱方案网 作者: bebop
无人机电调开发板的核心功能是将飞行控制器发出的控制信号转换为相应大小的驱动电流,从而精确调节电机转速,以实现飞行器在速度与动作上的既定控制要求。
由于无刷电机工作时所需电流较大,飞控板本身无法直接承受高负载电流,亦不具备直接驱动无刷电机的能力。因此,电调在系统中承担了两个关键角色:一是作为电机的供电与调速执行单元,二是作为飞控与电机之间的关键功率接口,实质上构成飞行控制指令与动力输出之间的必要衔接环节。
为帮助工程师快速导入可靠无人机方案,我爱方案网推荐极海APM32F411低压无感FOC双电机参考方案,其中还搭配了2颗GHD3440电机专用栅极驱动器。整个方案兼具高效率、高可靠和高性比等优势;低噪音设计,可提供更好的用户体验;同时还配备完善的过流、过压、故障诊断等功能。
扫码可申请免费样片以及获取产品技术规格书

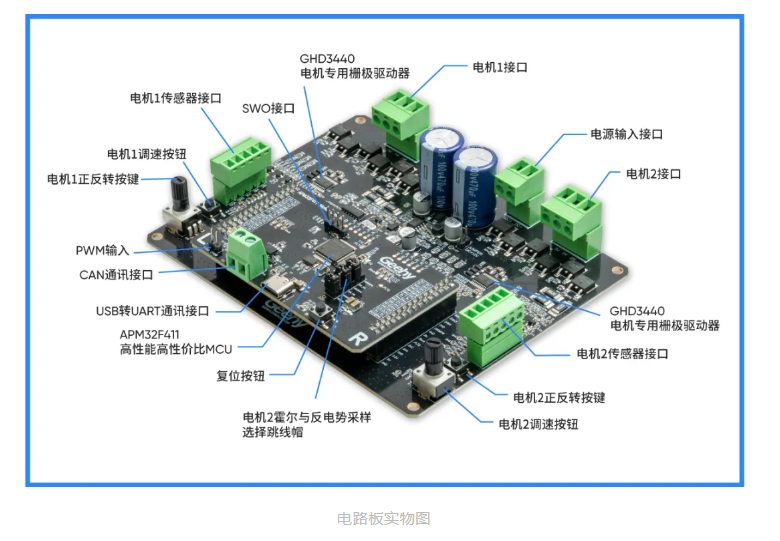
APM32F411低压无感FOC电调控制方案
方案前级通过APM32F411高性能高适配型MCU,集成两个高级定时器,每个高级定时器可输出三路带死区的互补 PWM,实现单芯片驱动两路BLDC 或 PMSM;集成两个12位高精度ADC分别对两路PMSM独立采样。后级则通过GHD3440电机专用栅极驱动器进行驱动信号放大,来控制MOSFET开关,最终实现对BLDC 或 PMSM的FOC控制。
方案优势
高算力控制: APM32F411主控芯片搭载Cortex-M4F内核,主频高达120MHz,可在单核内实现两路速度环、电流环双环运算,实现双路独立PMSM或BLDC控制;
丰富接口资源:集成U(S)ART、I2C、QSPI、SDIO、CAN等,既能满足无感/无感FOC控制、有感/无感方波控制,还能支持霍尔、磁编、光电等类型编码器;
执行效率高:MCU芯片以32KHz频率执行电流环,执行时间14μs,仅占执行周期的50%,剩余时间还可用于执行速度环、PFC、通信、显示等任务;
支持单/双电阻采样、三相反电势采样;
12V~72V DC宽电压输入,单电机最大功率100W。
(图源大联大 下同)
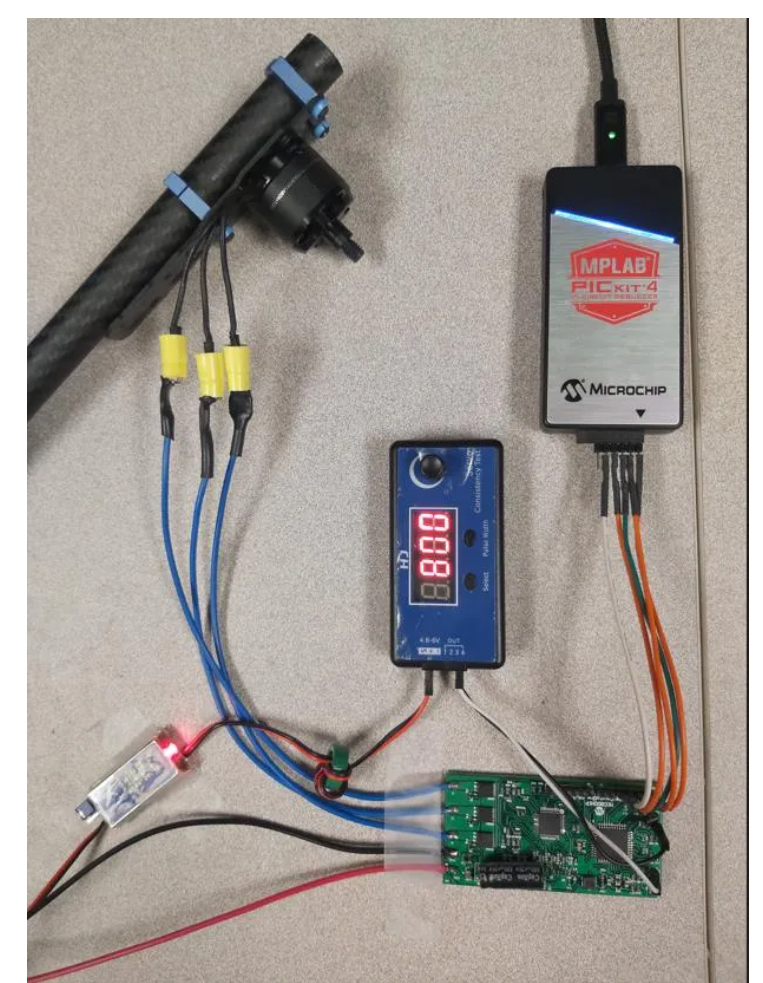
FOC电调参考设计基于微芯dsPIC33EP32MC204开发设计,是一个低成本的评估平台,适用于四旋翼/无人机应用。螺旋桨由三相永磁同步或无刷电机驱动。
►方案方块图
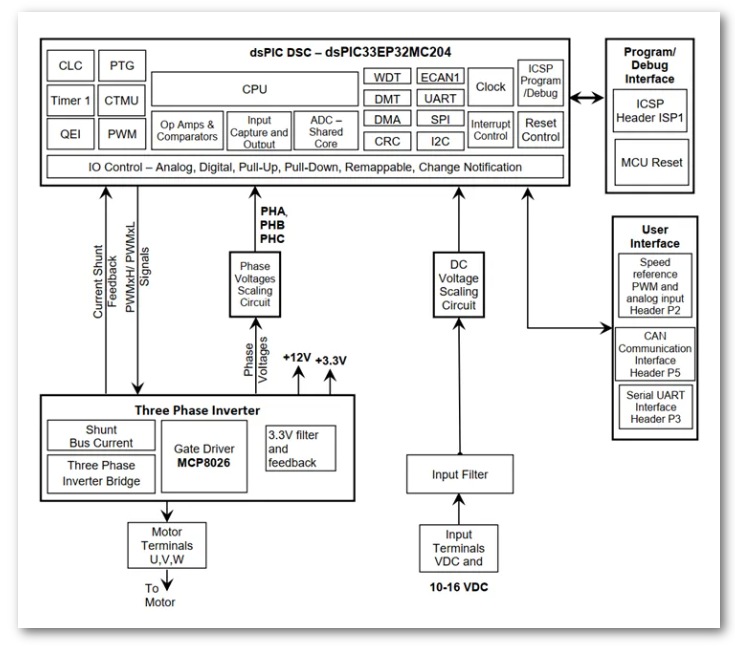
►核心技术优势
•三相电机控制功率级
•通过双分流电阻方法进行相电流反馈,以获得更高的性能
•相电压反馈,实现无传感器梯形控制或快速启动
•用于过电压保护的直流母线电压反馈
•使用Microchip编程器/调试器进行在线串行编程
•CAN通信
►方案规格
•输入电压:DC 11V~14V。
•极限电压:DC 20V。
•极限输入电流:10A。
•连续输出相电流:8A(RMS)
•峰值输出相电流:44A
•PWM输入:数字信号-PWM 50Hz,3~5V,4~55%占空比。
•模拟输入:0~3.3V
扫码可申请免费样片以及获取产品技术规格书


今年1月发布的MYD-YT153MX-MINI开发板精准切入国产核心板中端市场,以极致性价比获得了良好的市场反响。

随着智能家居的普及,扫地机器人已从随机碰撞清扫升级为具备路径规划、定时启动、分区清扫等智能功能的规划式清扫设备。这些核心功能的实现,均依赖于一个稳定可靠的时间基准——实时时钟芯片(RTC)。

我们推出的YSO171PS系列可编程展频振荡器(SSXO),凭借自主研发的频率调制技术,从源头化解EMI难题,为智慧诊疗设备提供稳如磐石的时序支撑。

我们依托在时钟频率器件领域的长期技术积累,打造了覆盖TCXO与OCXO系列的完整5G基站时钟解决方案,能够满足高精度同步与高可靠运行的网络需求,助力5G网络实现更优性能与更稳定服务。

京硅智能KSiC1并离网无缝切换开关方案,切换时间≤15ms(相当于1/4个交流周波),实现了真正的“无感知”无缝切换。



