发布时间:2026-03-11 阅读量:3426 来源: 我爱方案网 作者: bebop
2026年,全球机器人行业迎来了新一轮的融资热潮,国家大基金、中石化、中芯国际都开始布局具身机器人产业。
3月2日,具身机器人企业银河通用在官微宣布,已完成25亿元新一轮融资。此次投资方阵容强大,涵盖国家人工智能产业投资基金、中国石化、中信投资控股、中银资产、上汽金控、中芯聚源、亦庄国投、鲲鹏基金、无锡创投、福建产投、成都科创投等,且多家老股东继续追加投资。
其中,国家人工智能产业投资基金是国家大基金三期旗下投资机构。值得一提的是,这也是国家大基金三期首次入股具身智能赛道。
图片来源:银河通用
具身机器人产业蓬勃发展的同时,目前主要仍由英伟达垄断的人形机器人“大脑”芯片模组,也迎来了国产替代的新选择。
资料显示,国内知名SoC大厂瑞芯微的芯片方案已应用于宇树科技的人形机器人和四足机器狗产品中
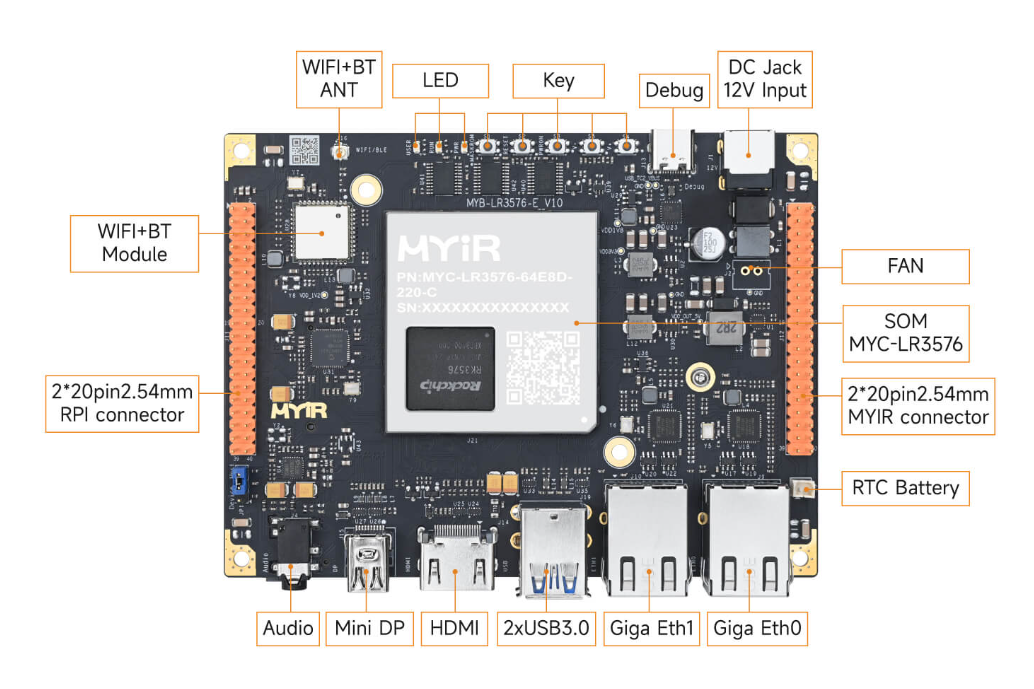
在此背景下,我爱方案网推荐基于瑞芯微RK3588旗舰级人工智能SoC开发的机器人控制板方案,可为下一代AMR机器人提供一个高性能、高集成度、高智能化的核心计算与控制大脑。
扫码可申请免费样片以及获取产品技术规格书

瑞芯微RK3588 AMR机器人控制板方案

方案优势:
采用RK3588芯片,提供丰富的工业接口变体(多千兆网口、CAN FD、RS485/232、USB3.0、PoE、DI/DO等),采用工业级设计,支持宽温宽压工作环境,具备优异的稳定性和抗震性,是AMR移动底盘理想的嵌入式控制器。
挑战:需实时处理激光雷达点云、IMU数据,运行复杂的SLAM算法,对CPU算力和实时性要求极高。
RK3588解决方案:
CPU大核集群 可保障 Cartographer、LIO-SAM、Hector_SLAM 等算法的实时运行,实现低延迟的建图与定位。
结合NPU,可探索 视觉-激光融合SLAM(如LOAM-Livox),利用NPU加速视觉特征提取,构建更丰富、更鲁棒的环境模型。
挑战: 需在复杂动态环境中进行全局/局部路径规划、动态避障,并处理多传感器(激光+视觉+超声波)的融合信息。
RK3588解决方案:
运行 ROS2 Nav2 导航框架,利用多核CPU高效执行 AMCL(自适应蒙特卡洛定位)、DWA/TEB局部规划器。
NPU可加速处理视觉避障信息,例如识别“玻璃门”、“深坑”等激光雷达难以检测的障碍物,实现更安全的导航。
挑战: 实时目标识别、跟踪、抓取点计算等任务,传统CPU方案资源占用高、帧率低。
RK3588解决方案:
NPU硬件加速 是关键。可部署 YOLOv5/v8、DeepSort 等模型,通过 YOLO-ROS2 等接口集成到ROS2系统中,实现毫秒级的目标检测与发布。
应用于物料识别、货架盘点、人脸迎宾、手势控制等场景,显著提升AMR的智能化水平和作业能力。
基于瑞芯微RK3576开发的除草机器人解决方案可实现育苗和杂草视觉识别、种植物行线采集、路径跟踪和行控除草等功能。该机器人系统包括四部分:视觉检测系统、机器控制器、移动平台和行控除草装置。视觉检测系统包括双目工业相机和上位机,可通过智能算法准确识别幼苗和杂草,获取种植物路线。

瑞芯微RK3576采用8nm工艺制程,集成4×Cortex-A72@2.2GHz与4×Cortex-A53@1.8GHz的八核架构,搭配Mali-G52 GPU和独立6 TOPS NPU,具备以下技术特性:
高性能异构计算:CPU算力达58K DMIPS,支持多任务并行处理,满足实时图像采集、导航决策与机械控制需求;
AI加速能力:NPU支持Transformer架构与主流深度学习框架(如TensorFlow、PyTorch),可本地化部署Gemma-2B、ChatGLM3-6B等轻量化大模型,实现杂草精准识别;
低功耗设计:典型功耗仅1.2W,支持无散热片设计,适应农业场景长时间户外作业;
工业级可靠性:符合-40℃~85℃宽温运行标准,并通过车规级AEC-Q100认证,确保复杂环境下的稳定性。
在除草机器人方案中,RK3576通过边缘计算能力实现“感知-决策-执行”闭环:
感知层:支持多路摄像头接入(如MIPI-CSI),结合AI算法实时识别杂草与作物;
决策层:基于NPU加速的深度学习模型(如YOLOv8)完成目标定位与路径规划;
执行层:通过CAN总线或GPIO接口控制激光模块或机械臂,实现精准除草。
扫码可申请免费样片以及获取产品技术规格书


基于RK3576开发板逐步构建一个功能完备的自主移动机器人系统,涵盖环境搭建、机器人建模、SLAM建图、自主导航以及生产级系统的优化与排错。
HPM5E3Y内置EtherCAT控制器和PHY,体积非常小,最小封装只有9×9毫米

如今的数字液晶仪表盘拥有更友好的HMI界面,多功能高精度、高灵敏度、接口丰富及更强的可扩展性
工业级3D打印机大多会使用MPU负责逻辑运算,MCU负责执行,可实现更高的打印速度和打印质量
在工业4.0的推动下,工业人机界面(HMI)已演进为集成实时监控、数据追溯与远程运维功能的智能化终端。无论是产线状态记录、故障报警的精确时间标记,还是构建全流程可追溯的日志链条,高精度、连续稳定的时间基准,都直接决定了HMI系统的运行可靠性与数据可信度。



