发布时间:2026-03-11 阅读量:3750 来源: 我爱方案网 作者: bebop
传统机械臂MCU受限于算力与实时性,往往难以在单芯片内同时实现高频伺服控制、高精度力矩感知及复杂轨迹规划,通常需要外置DSP或FPGA作为补充,增加了系统成本与功耗。
例如中小型多轴机械臂的关节驱动、轮式移动机器人的车轮控制,往往需要采用更高性能的芯片以实现高精度控制。
新一代面向机器人关节模组的高性能MCU,通过将多核高算力CPU、高分辨率PWM、高性能ADC以及实时通信接口(如EtherCAT、CAN FD)高度集成于单芯片中,实现了驱动与控制的一体化。这种高度集成大幅缩小了关节模组的物理尺寸与重量。
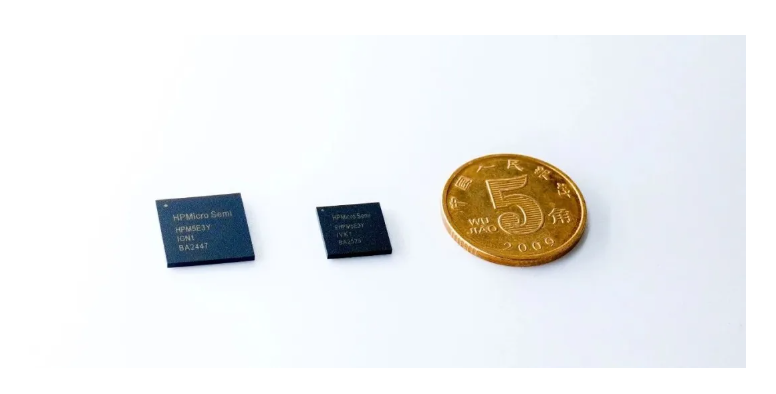
针对需求日益高涨的机器人市场,我爱方案网平台推荐先楫全新机器人关节专用MCU——HPM5E3Y,芯片内置EtherCAT控制器和PHY,兼具高算力、高集成度、实时通信等优势,同时体积非常小,最小封装只有9×9毫米,非常匹配机器人关节空间有限、设计紧凑的要求,并推荐基于该芯片开发的机器人关节伺服演示系统方案,助力芯片快速验证进程。
扫码可申请免费样片以及获取产品技术规格书

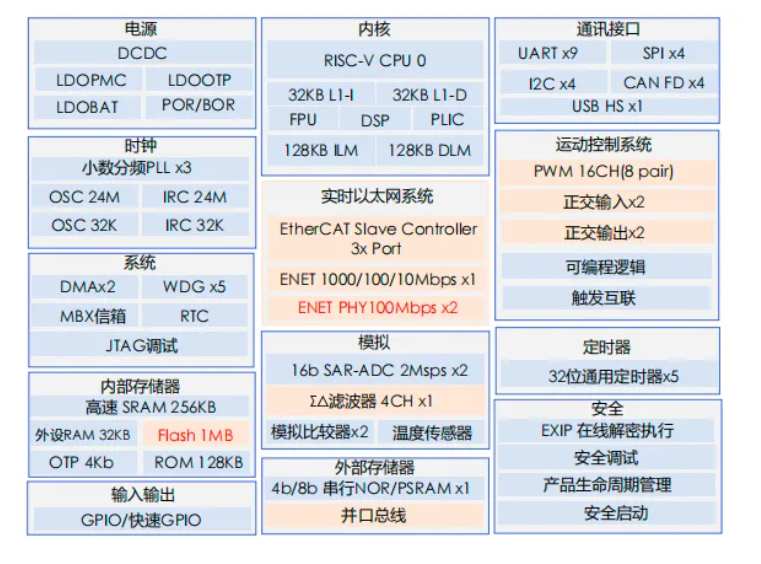
具体性能方面,HPM5E3Y系列MCU采用高实时性RISC-V内核,主频达480MHz,内置512KB RAM和1MB Flash闪存,片上集成2个以太网PHY收发器,配置EtherCAT从站控制器 (ESC: EtherCAT Slave Controller),千兆以太网口,以及16路高分辨率PWM输出,Σ∆ 数字滤波和高精度运动控制系统, 可以在工业自动化领域实现基于高实时性、低延时的以太网总线的高压/低压伺服、步进伺服、远程 IO、传感器和通讯模块等应用。
同时,该系列提供196 BGA和121 BGA两种灵活封装形式,其中196BGA封装与HPM6E8Y的相同封装实现硬件引脚兼容,可以在2个系列间实现无缝替换,而121BGA封装则是业界同类型方案中领先的小尺寸、高集成度产品。
产品性能
主频 480MHz,高性能RISC-V内核
512KB RAM,1 MB FLASH
EtherCAT 从站控制器,支持 3个端口
集成 2个百兆以太网 PHY
1个千兆以太网 MAC控制器
16通道 100ps 高精度 PWM
支持运动传感器接口,增量式位置传感器接口和磁编码器接口
支持可编程逻辑单元 PLB
4个 CAN/CAN-FD接口
2个 2MSPS 16位高精度 ADC
1个 4通道 ΣΔ滤波器
196 BGA,12x12,0.8 pitch
121 BGA,9x9,0.8 pitch
工作温度:-40 ~ 105˚C TA
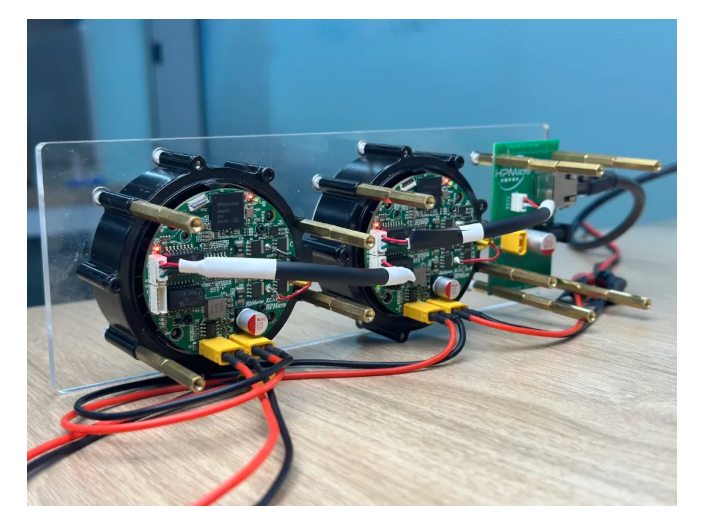
HPM5E3Y 方案Demo
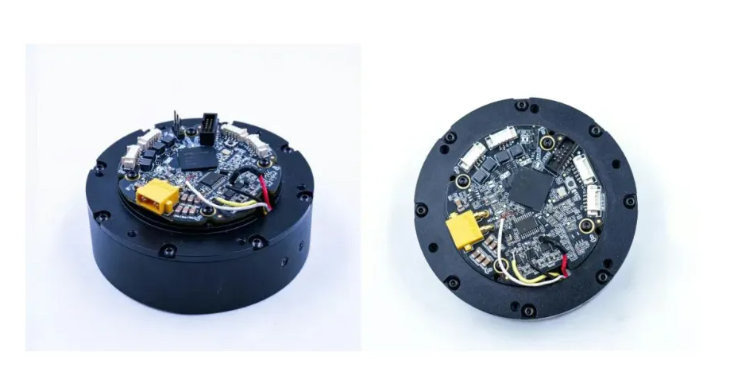
方案为基于HPM5E3Y的关节伺服解决方案,以RISC-V架构的单芯片集成EtherCAT通信与实时控制。该方案将高性能MCU芯片与电机驱动电路、编码器、减速器高度集成,体积更小、集成度更高,可灵活适配协作机器人的紧凑关节设计,降低整机身重量。同时,提供开源的软硬件设计文档资料,支持用户基于芯片自定义控制算法,兼容多场景二次开发。
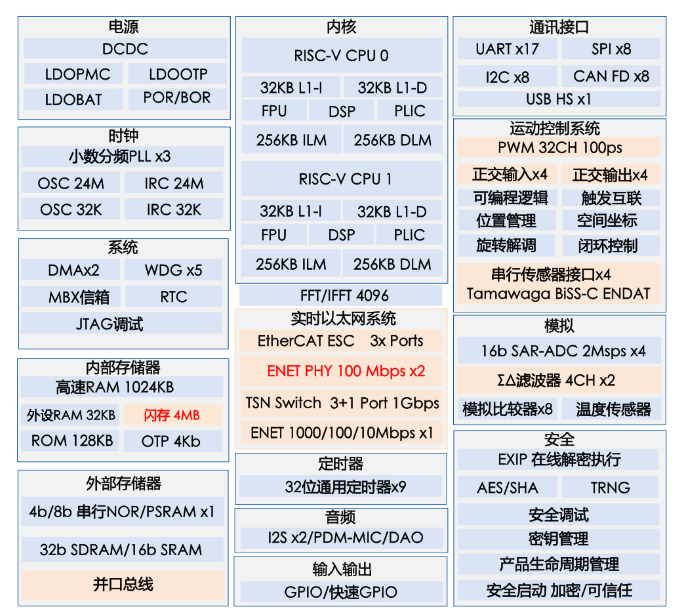
我爱方案网另外推荐升级版机器人关节电机专用控制系列芯片先楫HPM6E8Y,主频600MHz,集成2个以太网PHY收发器,内置4M flash,支持EtherCAT从控制器,满足机器人控制实时响应通信需求及小型化应用。
快速验证方案
先楫半导体提供机器人关节伺服演示系统方案,助力芯片快速验证进程。
该方案的特点:
内置HPM6E8Y芯片
支持CiA402(CSV,CSP)
支持FOE(OTA)
S曲线
保护功能:过流,过压,欠压,过温,飞车,编码器断线
支持hpm_monitor_studio
扫码可申请免费样片以及获取产品技术规格书


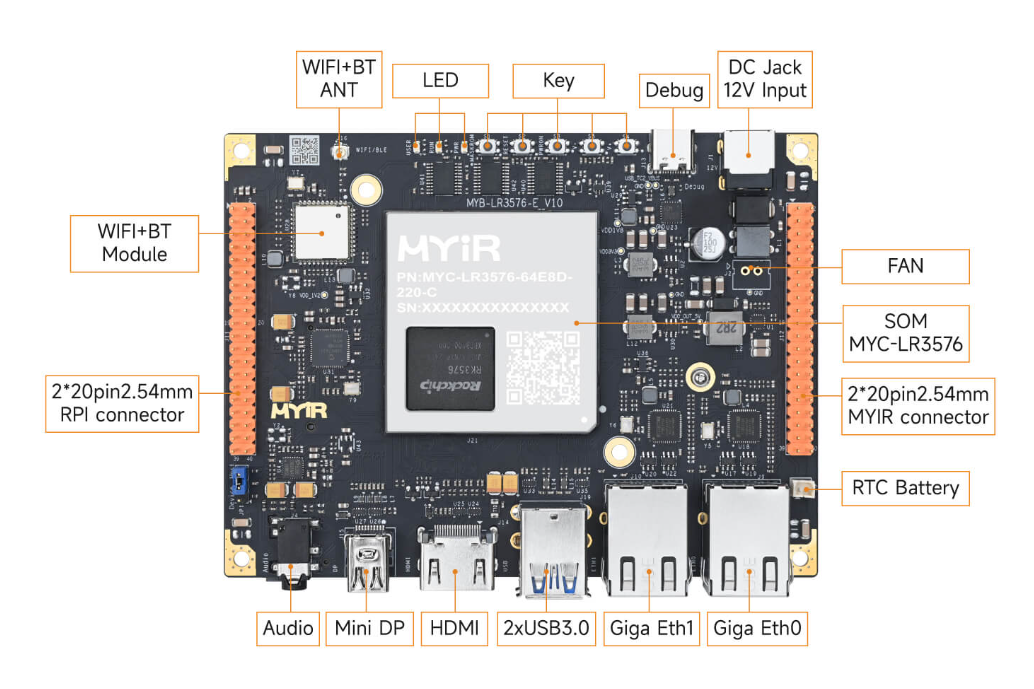
基于RK3576开发板逐步构建一个功能完备的自主移动机器人系统,涵盖环境搭建、机器人建模、SLAM建图、自主导航以及生产级系统的优化与排错。

具身机器人企业银河通用在官微宣布,已完成25亿元新一轮融资。 此次投资方阵容强大,涵盖国家人工智能产业投资基金、中国石化、中信投资控股、中银资产、上汽金控、中芯聚源、亦庄国投、鲲鹏基金、无锡创投、福建产投、成都科创投等,且多家老股东继续追加投资。

如今的数字液晶仪表盘拥有更友好的HMI界面,多功能高精度、高灵敏度、接口丰富及更强的可扩展性
工业级3D打印机大多会使用MPU负责逻辑运算,MCU负责执行,可实现更高的打印速度和打印质量
在工业4.0的推动下,工业人机界面(HMI)已演进为集成实时监控、数据追溯与远程运维功能的智能化终端。无论是产线状态记录、故障报警的精确时间标记,还是构建全流程可追溯的日志链条,高精度、连续稳定的时间基准,都直接决定了HMI系统的运行可靠性与数据可信度。



