发布时间:2026-05-14 阅读量:9937 来源: 发布人: suii
在上篇我们完成了 BLC、LSC、AWB 及 CCM 的客观标定、建立科学成像基准的基础上,本文将延续 ISP 调试流程,依次进行主观画质调试、IQ 文件配置与常见问题排查,直至实现全流程闭环落地。
《基于 RK3576 开发板的 MIPI 摄像头 ISP 全链路调试方案:从硬件准备到环境搭建(上)》
一、主观调试
主观调试流程总览
RK3576 ISP39 内部 Pipeline
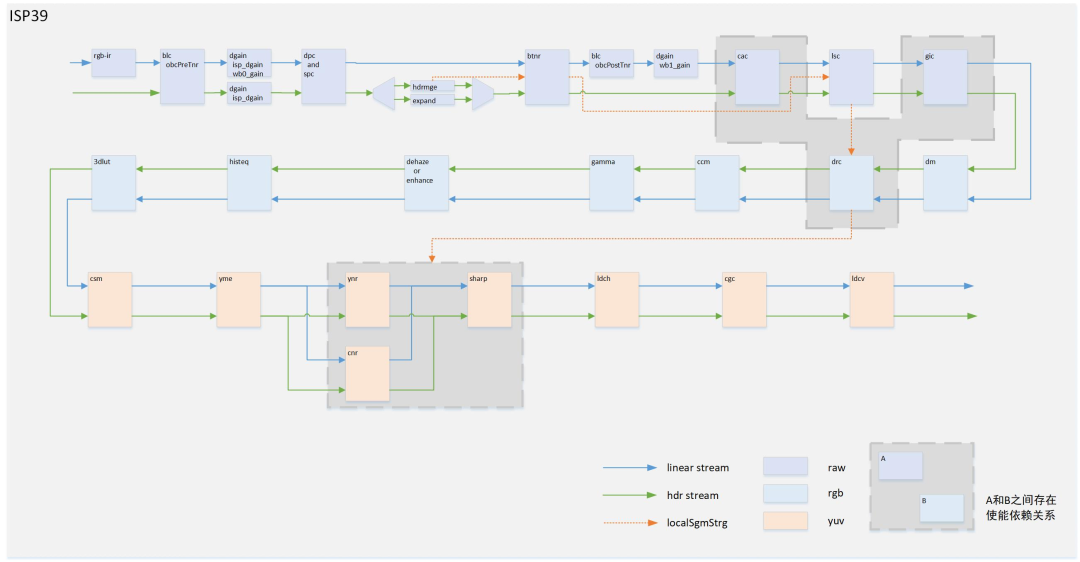
RK3576 ISP39 Pipeline 架构
RK3576开发板 搭载的 ISP39 是瑞芯微第三代 ISP 架构,支持 3 拍 1 出(3路 MIPI 输入 + 1 路输出)的处理能力。其内部 Pipeline 按处理顺序主要包括以下模块:
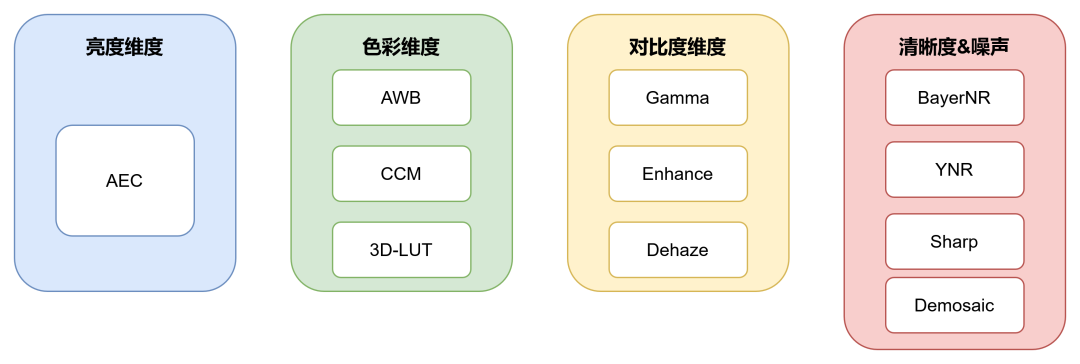
ISP39 核心 Pipeline 模块
· BLC 黑电平校正— 消除传感器暗电流偏移
· DPC 坏点校正— 检测并修复传感器固有坏点
· Bayershd Bayer 域阴影校正 — 去除镜头暗角
· LSC 镜头阴影校正— 补偿亮度/色彩不均匀
· AWB 自动白平衡— 色温自适应校正
· Demosaic 去马赛克— Bayer → RGB 插值重建
· CCM 色彩校正矩阵— 光谱响应适配
· 3D LUT 三维查找表— 精细色彩风格调校
· Gamma 伽马校正— 线性 → 非线性映射,匹配显示器
· EE/Sharpen 边缘增强— 提升图像清晰度与细节感
· 3DNR 3D 降噪 — 时域+空域联合降噪
在线调试操作
1. 使用 selfpath 节点进行预览
# 找到 selfpath 对应的 video 节点grep . /sys/class/video4linux/video*/name
# 进行摄像头预览gst-launch-1.0 v4l2src device=/dev/video12 ! \'video/x-raw,width=1920,height=1080,framerate=60/1' ! \videoscale ! 'video/x-raw,width=1920,height=1080' ! waylandsink
# 确认 mainpath 节点是否被占用,查看 Output 一列为 rkisp_selfpathcat /proc/rkisp-vir*
2. 使用 RKISP Tuner 进行在线调试
在 PC 端 RKISP Tuner 连接成功后,左侧面板为实时预览画面,右侧为各 ISP 模块参数调节面板。调节参数后可实时观察效果变化,确认满意后再写入 IQ 文件。
AE(自动曝光)调试
AE 控制画面的整体亮度和动态范围,是影响观感的第一要素。RK3576 的 AE 算法基于直方图统计和权重映射,支持多区域测光。

调试 AE 时注意防闪烁(Anti-Flicker):室内光源为 50Hz 时,曝光时间须为 10ms 的整数倍;60Hz 光源则须为 8.33ms 的整数倍。
3DNR(3D 降噪)调试
3DNR 是 RK3576 ISP39 的重要降噪模块,结合时域(帧间)和空域(帧内)降噪策略,在保持细节的同时有效抑制噪声。
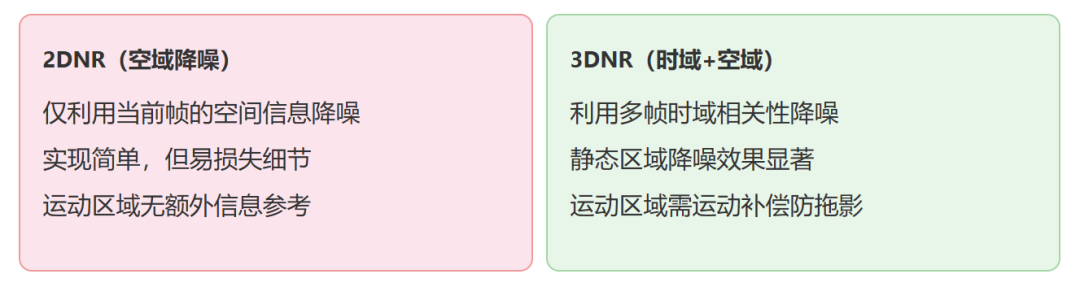
3DNR 的核心调试要点:
· 时域降噪强度:静态场景可适当加大,运动场景需减小以避免拖影(Ghosting)
· 运动检测阈值:阈值过高会导致运动物体拖影,过低则降噪效果不足
· 空域降噪强度:需与时域降噪配合,通常空域强度低于时域,避免过度涂抹
· 降噪与锐化的平衡:降噪会损失细节,需通过后续 Sharpen 模块适当补偿
Sharpen(锐化/边缘增强)调试
锐化模块用于补偿前级降噪和 Demosaic 插值带来的细节损失,提升图像清晰度感知。

验证方法:在高对比度边缘区域(如黑色文字白色背景)检查是否存在明显的光晕效应(白色边缘外出现亮环)。若有,需降低锐化强度或增大噪声阈值。
Gamma 调试
Gamma 校正将传感器的线性光信号映射为非线性输出,以匹配显示设备的亮度响应特性和人眼的亮度感知特性。
· 标准 Gamma 2.2:适用于一般 sRGB 显示场景,是最常用的默认曲线
· 自定义 Gamma 曲线:可根据项目需求调整暗部/亮部映射关系,实现特定风格
· 暗部提亮:增大低输入区域斜率,改善暗部可见度
· 亮部压缩:减小高输入区域斜率,防止高光溢出
Gamma 曲线修改会影响 AE 的目标亮度判定,调整 Gamma 后需重新验证 AE 行为。
3D LUT(三维查找表)调试
3D LUT 提供对 RGB 色彩空间的全维度精细调校能力,可实现 CCM 无法覆盖的复杂色彩映射,适合进行特定的色彩风格化处理。
· 用途:色彩风格调校(如暖色调、冷色调、电影风格等),弥补 CCM 在某些色彩区域的残余偏差
· 调试方法:在 RKISP Tuner 中导入 3D LUT 文件(通常为 17×17×17 或 33×33×33 的立方体网格),通过调整网格节点值实现色彩映射
· 注意事项:3D LUT 的修改范围不宜过大,否则可能出现色彩断层或伪影。建议在 CCM 调试完成后再使用 3D LUT 进行微调
二、IQ文件配置与烧录
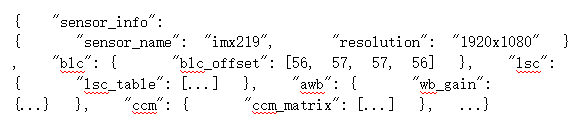
IQ 文件结构
IQ(Image Quality)文件是 ISP 算法参数的载体,以 JSON 格式存储,包含所有 ISP 模块的配置参数。RK3576 的 IQ 文件通常命名为<sensor_model>.json,存放在板端 /etc/iqfiles/ 目录下。
IQ 文件烧录流程
1.在 RKISP Tuner 中完成参数调试后,点击"Save"将参数导出为 JSON 文件
2.通过 ADB 或 SCP 将 IQ 文件推送到板端 /etc/iqfiles/ 目录
3.重启 MYD-LR3576 开发板或重启 3A 服务使新 IQ 文件生效
# 通过 ADB 推送 IQ 文件adb push imx219.json /etc/iqfiles/
# 通过 SCP 推送 IQ 文件scp imx219.json root@192.168.1.173:/etc/iqfiles/
# 重启摄像头服务killall rkaiq_tool_server# 或直接重启系统reboot
IQ 文件命名必须与设备树(DTS)中rockchip,camera-module-name 属性匹配,否则 ISP 无法自动加载对应参数。
三、常见问题与排查
Q1:预览画面全黑或全绿,无正常图像
可能原因:
· MIPI CSI 时序配置错误(CLK/Lane 数量、速率不匹配)
· Sensor 初始化序列未正确加载或 I2C 通信失败
· 电压/时钟未使能
排查步骤:
1. 检查内核日志:dmesg | grep -i "mipi\|csi\|sensor"
2.确认 Sensor I2C 通信:i2cdetect -y <bus> 检查传感器地址是否响应
3.使用 media-ctl -p 检查 Media Pipeline 拓扑是否正确连接
Q2:画面有明显的偏色(整体偏蓝/偏黄/偏绿)
可能原因:
· AWB 参数未标定或标定光源不充分
· CCM 矩阵偏差过大
· LSC 色彩补偿不均匀
排查步骤:
1.先确认 BLC 和 LSC 是否已正确标定(前置模块偏差会级联影响 AWB)
2.在当前光源下重新标定 AWB,确认 WB Gain 是否合理
3.检查 CCM 矩阵的 ΔE 指标是否达标
Q3:画面四角偏暗(暗角明显)
可能原因:
· LSC 参数未标定或标定环境不标准
· 镜头本身暗角严重,超出 LSC 补偿能力
排查步骤:
1.重新标定 LSC,确保匀光片使用正确,光源均匀
2.在 RKISP Tuner 中查看 LSC Gain Table,确认增益值是否合理(一般不超过 4x)
3.若 LSC 增益已很大仍有暗角,可能需要更换镜头模组
Q4:运动场景出现拖影(Ghosting)
可能原因:
· 3DNR 时域降噪强度过高
· 运动检测阈值设置不合理
· 帧率过低导致帧间间隔过大
排查步骤:
1.降低 3DNR 时域降噪强度,或增大运动检测灵敏度
2.确认帧率是否达到预期(通过 v4l2-ctl --device=/dev/videoX --set-fmt-video=width=1920,height=1080,pixelformat=NV12 --set-parm=60)
3.在快速运动场景下反复验证,找到降噪与拖影的平衡点
Q5:RKISP Tuner 连接板端失败
可能原因:
· rkaiq_tool_server 未运行或已崩溃
· 网络不通或防火墙拦截
· rkaiq_tool_server 版本与 RKISP Tuner 版本不匹配
排查步骤:
1.在板端确认进程运行:ps | grep rkaiq_tool_server
2.PC 端 ping 板端 IP 确认网络连通
3.确认版本一致:RKISP Tuner 和 rkaiq_tool_server 必须使用同一 SDK 版本
4.重启 rkaiq_tool_server 后重试连接
Q6:曝光闪烁(室内灯光场景画面周期性明暗变化)
可能原因:
· Anti-Flicker 未开启或频率设置错误
· 曝光时间未与光源频率同步
排查步骤:
1.开启 Anti-Flicker 并设置为 50Hz(国内电网频率)
2.确保最小曝光时间为 10ms 的整数倍(50Hz)
3.在 IQ 文件中确认 AE Anti-Flicker 配置已生效
调试速查表
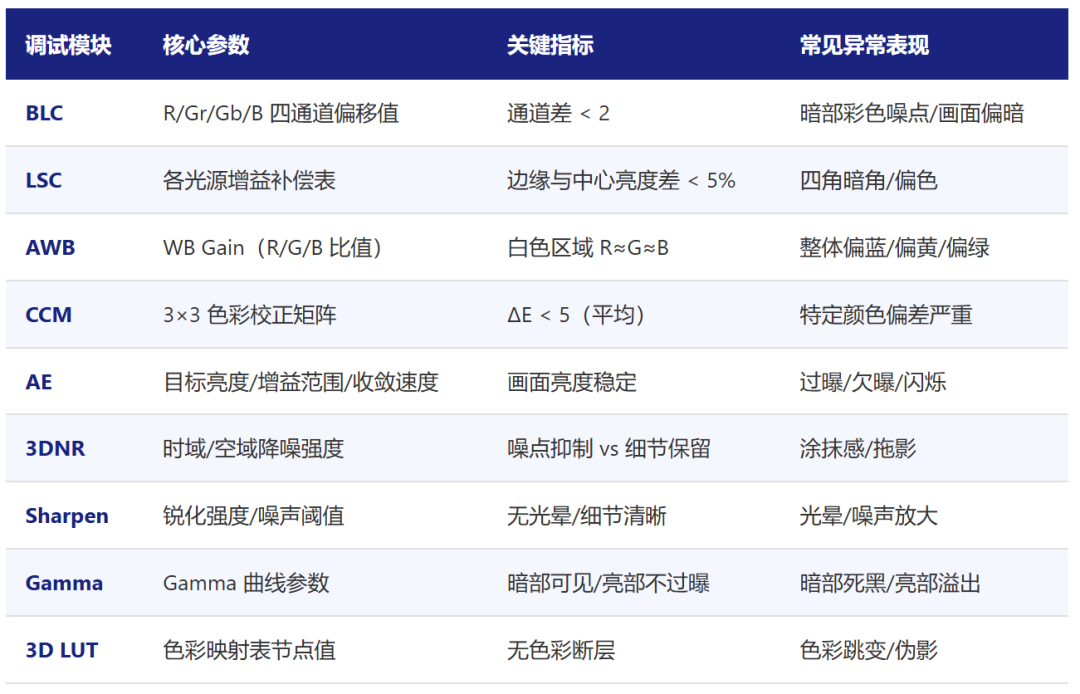
调试经验总结求卓越
1. 严格遵循 Pipeline 顺序:ISP 各模块是串联流水线,前级模块的输出是后级的输入。跳过 BLC 直接调 AWB,或跳过 AWB 直接调 CCM,都会导致参数级联失真。
2. 每次只调一个模块:同时修改多个模块参数将无法判断效果归属,增加排错难度。每调一个参数,观察效果,记录变化。
3. 多场景验证:室内/室外、强光/暗光、静止/运动等多种场景下都要验证调试效果,确保参数的泛化能力。
4. 记录参数变更:每次修改参数时记录变更内容和效果,方便回溯。建议维护一份参数变更日志。
5. 善用 IQ 文件继承:从相近模组的 IQ 文件开始修改,比从零创建效率高得多。瑞芯微官方 SDK 通常提供多个参考 IQ 文件。
6. 关注模块间耦合:Gamma 改变影响 AE、3DNR 强度影响 Sharpen、LSC 改变影响 AWB……调试时需关注上下游联动效应。
完整调试流程回顾:资料准备 → 环境搭建 → BLC 标定 → LSC 标定 → AWB 标定 → CCM 标定 → AE/3DNR/Sharpen/Gamma/3D LUT 主观调试 → IQ 文件烧录 → 多场景验证 → 完成

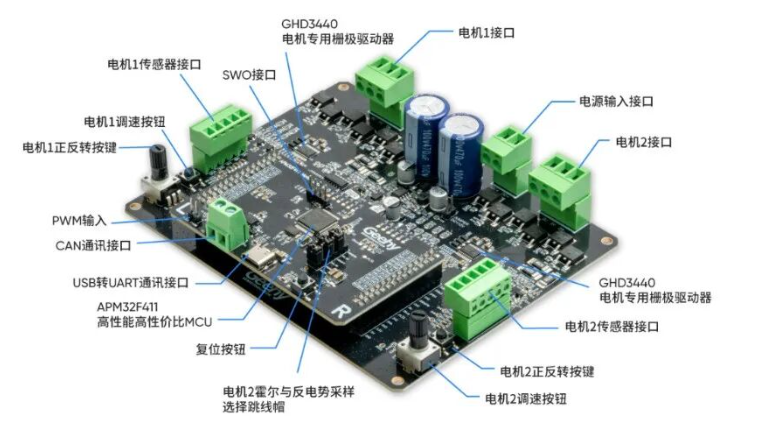
EtherCAT 总线凭借高速实时、拓扑灵活的优势成为运动控制领域的主流选择,而双路 EtherCAT 主站控制器更是能满足复杂产线的多场景分区控制需求

方案集成星闪SLE模组,10路UART与2路CAN FD,成本更低,含税单价仅98元
方案集成两个高级定时器,每个高级定时器可输出三路带死区的互补 PWM,实现单芯片驱动两路BLDC 或 PMSM
毫米波雷达人体感应模组通过智能算法可精准区分人体与其他运动物体(如宠物、窗帘摆动),大幅降低误报率。
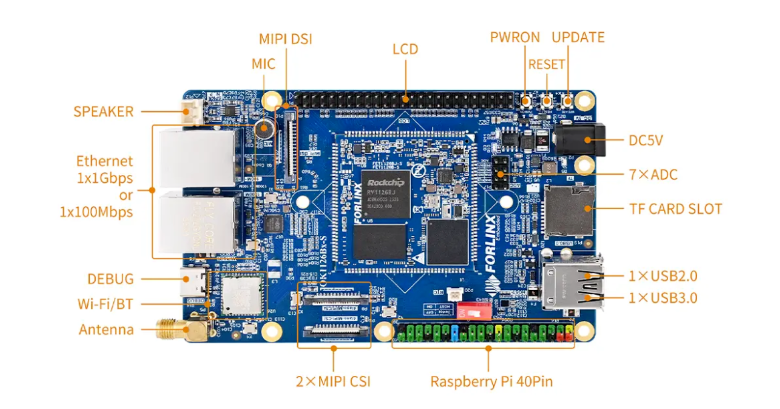
RV1126B芯片内置专用的硬件拼接模块,依靠硬件完成图像融合,大幅降低CPU与内存资源占用,适配低功耗边缘视觉场景。



