发布时间:2014-11-4 阅读量:2981 来源: 我爱方案网 作者:
热门拆解:
小米小蚁智能摄像头拆解 看149元做工质量如何?
太坑爹了!这叫升级?iPad mini 3 拆解测评曝光
【拆解】索立信T11四核通话大平板内部做工分析

开门见山。






















屏幕模块的边缘其实是存在边框的,拆解开之后这一圈黑边就无所遁形了。

最后看看关键的前面板保护模块,拆分开来时已经面目全非了。官方称材质是特制水晶面板,可以看到整个前面板仍然是存在边框的,只是Crystal巧妙地将这一圈的黑色边框弯折到手机边缘将屏幕包裹住,再配合特殊切割工艺形成的透视角度,最终达到无边框的视觉效果。
与想象的水晶面板不同,实际上Crystal这块面板的质感和特性都更像是塑料,加热分离时会变形,如下是拆分开前面板正面照,依然可见边缘比较剔透的效果。
翻个面,边缘因为受热翻卷了,黑色的边框看得很清楚。





韩国OLED沉积设备大厂YAS近期斩获TCL华星订单,将为后者8.6代OLED产线供应蒸发源。
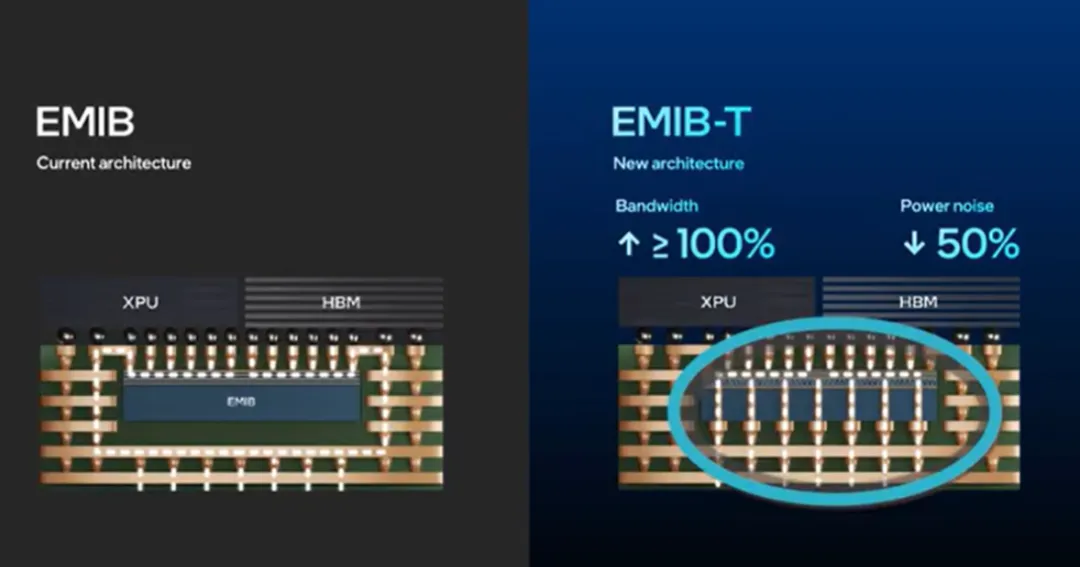
英特尔旗下晶圆代工业务 Intel Foundry 近日发布了新一代 EMIB(Embedded Multi-Die Interconnect Bridge,嵌入式多芯片互连桥接)先进封装技术——EMIB-T。

黄仁勋透露,中国台湾新总部将延续加州总部设计风格,预计2030年入驻。该基地规划面积约70万平方英尺,可容纳约4000名员工。

三星电子工会成员投票批准了上周敲定的奖金方案,终结了存储芯片业务部门此前的罢工危机。

据THE ELEC报道,韩国化工企业PKC宣布将在全罗北道群山工厂把半导体用高纯度氯气(Cl₂)产能提升50%,年产能由1400–1500吨扩至2100–2200吨



