发布时间:2020-11-16 阅读量:1299 来源: 我爱方案网 作者: 我爱方案网
开环控制放大倍数,在典型的二阶系统中,阻尼系数x=1/2(KT)-½,速度稳态误差e(∞)=1/K,其中K为开环放大倍数,多称作开环增益。显然,系统的开环放大倍数是影响伺服系统的静态、动态指标的重要参数之一。

一般情况下,数控机床伺服机构的放大倍数取为20~30(1/S)。通常把K20的系统称为高放大倍数或硬伺服系统,应用于轮廓加工系统。假若为了不影响加工零件的表面粗糙度和精度,希望阶跃响应不产生振荡,即要求是取值大一些,开环放大倍数K就小一些;若从系统的快速性出发,希望x选择小一些,即希望开环放大倍数~增加些,同时K值的增大对系统的稳态精度也能有所提高。
因此,对K值的选取是必需综合考虑的问题。换句话说,并非系统的放大倍数愈高愈好。当输入速度突变时,高放大倍数可能导致输出剧烈的变动,机械装置要受到较大的冲击,有的还可能引起系统的稳定性问题。这是因为在高阶系统中系统稳定性对K值有取值范围的要求。低放大倍数系统也有一定的优点,例如系统调整比较容易,结构简单,对扰动不敏感,加工的表面粗糙度好。
平均故障(失效)间隔时间(MTBF)是指发生故障经修理或更换零件还能继续工作的可修复设备或系统,从一次故障到下一次故障的平均时间,数控机床常用它作为可靠性的定量指标。由于数控装置采用微机后,其可靠性大大提高,所以伺服系统的可靠性就相对突出。它的故障主要来自伺服元件及机械传动部分。通常液压伺服系统的可靠性比电气伺服系统差,电磁阀、继电器等电磁元件的可靠性较差,应尽量用无接触点元件代替。
内部补偿式ACM的不同之处在于,它是一款渐变型、峰值电流模式控制方案,无需外部补偿,即可在内部形成斜坡获得真定频。内部补偿式ACM对功率级变量(电感器和电容器)还具有良好的抗干扰性能。简单的控制结构所具备的优势:输出电压反馈回路性能良好,操作简便。无需补偿网络,仅需RS1和RS2作为电阻分压器就可以感应Vout,并且被感应的Vout信息将通过VFB发送回控制回路。因为PID(比例-积分-微分)或PI(比例-积分)补偿不借助外部元件,设计师可以不用采纳复杂的补偿设计,使其用起来更方便。取消使用外部补偿元件还可以节省元件数量和宝贵的印制电路板空间。内部补偿式ACM包含电压回路、斜坡回路、比较器、电流反馈和脉冲宽度调制(PWM)逻辑。

各构件功能:电压回路感应并处理VFB的错误信号。斜坡回路根据VIN和PWM信号生成斜坡电压。经优化的斜坡补偿值仅为下降斜率斜坡电压的一半。回路比较器可以产生输入信号,并且在正端输入总值等于负端输入总值时终止PWM循环。电流反馈也利用直流电信息优化回路的Q因子。PWM逻辑根据时钟和回路比较器的输出生成PWM信号。
在任何数字电子系统中,时钟信号都扮演着“心脏起搏器”的角色。

RTC晶振与普通32.768kHz晶振的PCB设计要点基本一致,其核心均在于通过优化布线以降低杂散电容、确保频率精度,并依托合理的布局规划最大限度屏蔽来自板上其他信号源的电磁干扰。
按晶振的功能和实现技术的不同,分为温度补偿晶振(TCXO)、压控晶振(VCXO)、恒温晶振(OCXO)。
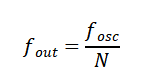
为了在性能与功耗之间取得最佳平衡,需要根据具体应用场景,对基准时钟进行相应的分频、倍频或转换处理,从而为各模块提供适宜的时钟信号。此时,分频技术就成为连接晶振基准频率与系统需求的关键,通过数字电路将晶振原始频率按固定比例降低,输出符合要求的低频时钟信号。
RTC芯片是一种专门用于精准计时、掉电续时的专用集成电路,其核心功能是提供精准、稳定的时间信息(包括秒、分、时、日、月、周、年),并能在主电源断电后依靠备用电池继续保持计时,从而确保时间持续不间断。



