发布时间:2021-09-10 阅读量:917 来源: 我爱方案网 作者: 我爱方案网整理
运动伺服驱动一般都是三环控制系统,从内到外依次是电流环、速度环、位置环。

1、电流环:
电流环的输入是速度环PID调节后的那个输出,我们称为“电流环给定”吧,然后呢就是电流环的这个给定和“电流环的反馈”值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。
2、速度环:
速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值,我们称为“速度设定”,这个“速度设定”和“速度环反馈”值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出就是上面讲到的“电流环的给定”。速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的。
3、位置环:
位置环的输入就是外部的脉冲(通常情况下,直接写数据到驱动器地址的伺服例外),外部的脉冲经过平滑滤波处理和电子齿轮计算后作为“位置环的设定”,设定和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的PID调节(比例增益调节,无积分微分环节)后输出和位置给定的前馈信号的合值就构成了上面讲的速度环的给定。位置环的反馈也来自于编码器。
伺服的电流环的PID常数一般都是在驱动器内部设定好的,操作使用者不需要更改。
速度环主要进行PI(比例和积分),比例就是增益,所以我们要对速度增益和速度积分时间常数进行合适的调节才能达到理想效果。位置环主要进行P(比例)调节。对此我们只要设定位置环的比例增益就好了。
位置环、速度环的参数调节没有什么固定的数值,要根据外部负载的机械传动连接方式、负载的运动方式、负载惯量、对速度、加速度要求以及电机本身的转子惯量和输出惯量等等很多条件来决定,调节的简单方法是在根据外部负载的情况进行大体经验的范围内将增益参数从小往大调,积分时间常数从大往小调,以不出现震动超调的稳态值为最佳值进行设定。
当进行位置模式需要调节位置环时,最好先调节速度环(此时位置环的比例增益设定在经验值的最小值),调节速度环稳定后,在调节位置环增益,适量逐步增加,位置环的响应最好比速度环慢一点,不然也容易出现速度震荡。
在任何数字电子系统中,时钟信号都扮演着“心脏起搏器”的角色。

RTC晶振与普通32.768kHz晶振的PCB设计要点基本一致,其核心均在于通过优化布线以降低杂散电容、确保频率精度,并依托合理的布局规划最大限度屏蔽来自板上其他信号源的电磁干扰。
按晶振的功能和实现技术的不同,分为温度补偿晶振(TCXO)、压控晶振(VCXO)、恒温晶振(OCXO)。
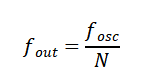
为了在性能与功耗之间取得最佳平衡,需要根据具体应用场景,对基准时钟进行相应的分频、倍频或转换处理,从而为各模块提供适宜的时钟信号。此时,分频技术就成为连接晶振基准频率与系统需求的关键,通过数字电路将晶振原始频率按固定比例降低,输出符合要求的低频时钟信号。
RTC芯片是一种专门用于精准计时、掉电续时的专用集成电路,其核心功能是提供精准、稳定的时间信息(包括秒、分、时、日、月、周、年),并能在主电源断电后依靠备用电池继续保持计时,从而确保时间持续不间断。



