发布时间:2021-09-17 阅读量:881 来源: 我爱方案网 作者: 我爱方案网整理
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。

6轴工业机器人的全部控制由一台微型计算机完成。另一种是分散(级)式控制,即采用多台微机来分担机器人的控制,如当采用上、下两级微机共同完成机器人的控制时,主机常用于负责系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。根据作业任务要求的不同,机器人的控制方式又可分为点位控制、连续轨迹控制和力(力矩)控制。
6轴工业机器人的特点主要有以下几方面:
(1)可编程:6轴工业机器人最大特点是柔性启动化,柔性制造系统中的一个重要组成部分。工业机器人可随其工作环境变化以及加工件的变化进行再编程,适合于小批量多品种具有均衡高效率的柔性制造生产线的应用。
(2)拟人化:6轴工业机器人结合机器人与人的特点。在6轴工业机器人的结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。其传感器提高了工业机器人对周围环境的自适应能力。
3)通用性:一般6轴工业机器人在执行不同的作业任务时具有较好的通用性。当然也有专用的工业机器人。
4)机电一体化:6轴工业机器人是机械学和微电子学的结合-机电一体化技术。工业机器人具有各种传感器可以获取外部环境信息,而且还具有记忆能力、语言理解能力、图像识别能力、推理判断能力等人工智能,这些都是微电子技术的应用,特别是计算机技术的应用密切相关。
六轴关节工业机器人的研发设计及制造已经有好几十年的历史了,整个工业机器人的研发制造体系较为完善,各研发厂家在相互竞争中可以相互模仿、改善、不断推陈出新。博立斯多年来坚持投入研发、生产各类自动化设备,其中包括:数控车床机械手、上下料机械手、机床机械手、冲压机械手、6轴工业机器人、4轴工业机械手、多轴工业机器人等。多年来不断推陈出新,研发生产的自动化设备帮助许多企业解决了生产难题,备受企业的喜爱。
在任何数字电子系统中,时钟信号都扮演着“心脏起搏器”的角色。

RTC晶振与普通32.768kHz晶振的PCB设计要点基本一致,其核心均在于通过优化布线以降低杂散电容、确保频率精度,并依托合理的布局规划最大限度屏蔽来自板上其他信号源的电磁干扰。
按晶振的功能和实现技术的不同,分为温度补偿晶振(TCXO)、压控晶振(VCXO)、恒温晶振(OCXO)。
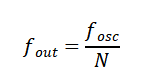
为了在性能与功耗之间取得最佳平衡,需要根据具体应用场景,对基准时钟进行相应的分频、倍频或转换处理,从而为各模块提供适宜的时钟信号。此时,分频技术就成为连接晶振基准频率与系统需求的关键,通过数字电路将晶振原始频率按固定比例降低,输出符合要求的低频时钟信号。
RTC芯片是一种专门用于精准计时、掉电续时的专用集成电路,其核心功能是提供精准、稳定的时间信息(包括秒、分、时、日、月、周、年),并能在主电源断电后依靠备用电池继续保持计时,从而确保时间持续不间断。



