发布时间:2024-02-29 阅读量:3947 来源: 我爱方案网 作者: wenwei
【导读】在自动化设备和机器人应用中,步进电机是一种常见的执行元件,用于实现精确的位置控制和速度控制。在设计这些系统时,选择合适的步进电机驱动器至关重要。快包分析师分析对比了不同类型的步进电机驱动器的成本、结构及性能特点,总结了5条步进电机驱动器的选型要素。同时也推荐了低成本、低振动和高速度的步进电机驱动器方案以供参考。
步进电机驱动器分类
根据控制方式和驱动电流的不同,步进电机驱动器可以分为以下几类:
1、电压驱动器
电压驱动器是一种基本的驱动方式,通过改变驱动电压来控制步进电机的转速和位置。这种驱动器的特点是结构简单、成本低,但动态性能较差,容易发热和失步。
2、恒流驱动器
恒流驱动器通过对电流进行控制来驱动步进电机,能够确保电机在运行过程中的电流保持恒定。这种驱动器的特点是动态性能好、发热较低,但结构相对复杂,成本较高。
斩波恒流驱动系统是电机控制领域普遍采用的电机驱动方案,它通过斩断直流电源的正负极,使电机得到恒定的电流驱动。具有简单实用、转速稳定等优点,广泛应用于工业生产、机器人、汽车等领域。快包分析师推荐采用先进的双极性恒流斩波技术_两相步进电机驱动器方案。

本方案采用THB6064MQ大功率、高细分两相混合式步进电机驱动芯片,在低成本、低振动、小噪声、高速度的设计中应用效果较佳,适配42,57系列步进电机。
方案特点
○ 采用先进的双极性恒流斩波技术
○ 内部过流、过温等保护电路
○ 十四档细分可调,最高128细分
○ 适配42,57系列步进电机
○ 采用模块化设计使得电流更简化,成本更低
了解更多电机驱动方案与IC选型

3、微步驱动器
微步驱动器是一种高精度驱动方式,通过分割步进电机的基本步距,实现更细致的位置控制。这种驱动器具有高精度、低振动、低噪音的特点,适用于对精度要求较高的应用场景。
4、闭环驱动器
闭环驱动器通过增加编码器或者其他传感器来实现对步进电机位置的实时反馈,实现高精度的位置控制。这种驱动器具有高精度、高动态性能、低失步率的特点,但结构较复杂,成本较高。
步进电机驱动器选型
1、电压与电流适配
在选择驱动器前,要确定步进电机的额定电流,驱动器的最大电流是不能低于电机的额定电流的。由于驱动器的输出电流可以在固定范围内调整,如果这个浮动区间不能满足电机的额定电流,电机会输出力矩不够,还容易熄火。
同理,驱动器的输出电压要在电机的工作电压范围内,不能出现过压的情况,需要将急刹车、急变速等情况考虑进去,如果在存在过压情况,电机很可能会在一瞬间罢工。
2、细分要求
根据电机的工作环境和工作要求等确认所需的细分要求。细分是控制精度的标志,通过增大细分能改善精度。细分数越高,电机的运动越平滑,但同时也会降低电机的转矩。因此在选择时应综合考虑。
步进电机(尤其是反应式步进电机)都有低频振荡的特点,如果您的电机需要工作在低频共振区工作,则细分驱动器是很好的选择。此外,细分比不细分,输出转矩对各种电机都有不同程度的提升。
3、转矩适配
转矩是电机的重要参数,确定电机所带负载所需的转矩,所选驱动器的转矩需满足电机使用,不然电机很可能无法正常工作,甚至直接罢工。
4、最大转速
由于是驱动器控制电机,所以在转速上驱动器的最大转速不能低于步进电机的最大转速的,不然电机工作起来功能受限。
5、相数相等
相数必须相等,如电机是二相的,步距角就是1.8°,驱动器必须是二相的,如电机是三相的,步距角就是1.2°,驱动器也必须是三相的。
总结
综上所述,我们主要是根据电机的电流、电压、细分、转矩和转速等因素来选择驱动器。在实际应用中,我们需要根据具体情况灵活调整选型策略,以满足不同应用场景的需求。

英特尔计划向人工智能芯片初创公司SambaNova追加投资1500万美元,该公司董事会主席由英特尔CEO陈立武担任。
据4月2日消息,台媒《工商时报》此前报道称联发科已开始下调在晶圆代工厂的4nm工艺投片量;而《电子时报》消息进一步指出,高通也已跟进采取类似减产措施。
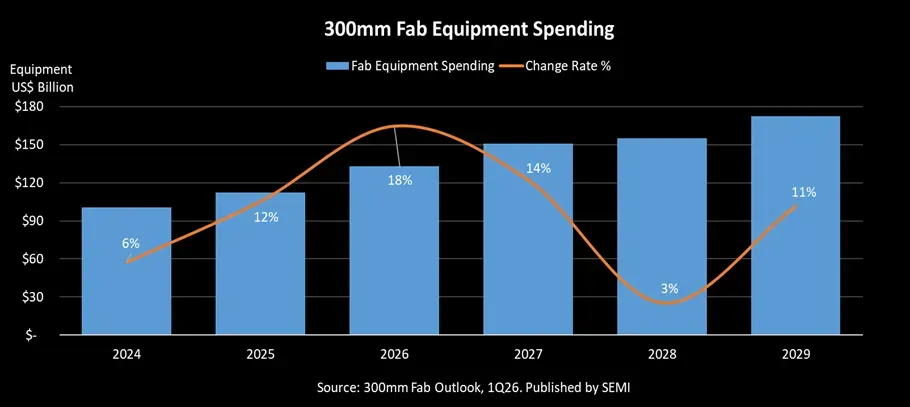
根据SEMI最新发布的《300mm晶圆厂展望》报告,预计全球300mm晶圆厂设备支出将在2026年实现18%的增长,达到1330亿美元,并将在2027年进一步增长14%,至1510亿美元。
FuriosaAI 的第二代 AI 推理芯片 RNGD 初始配备 48GB HBM3 内存,近期将升级至 72GB HBM3E
受全球智能手机需求走弱影响,供应链已转为防守状态。据供应链相关消息,由于手机市场前景不明朗,手机芯片(SoC)厂商已开始下调投片规模,其中联发科已在晶圆代工厂减少4nm制程芯片的投片量,反映出手机产业链景气度明显降温。



