发布时间:2024-03-15 阅读量:1317 来源: YXC 发布人: bebop
对于可编程晶振调整频率可以直接使用说明进行操作。晶体振荡器单元的实际驱动电平在驱动电平规格内。晶振作为电子产品中的必需品,广泛应用于各个领域,存在各种问题,如晶振异常振荡频率、晶振异常振荡频率包括无频率信号号输出以及实际振荡频率与标称频率的差异等。
过高的驱动电平可能导致更高的振荡频率或更大的R1。如何衡量驾驶水平如果实际负载电容与规格中规定的负载电容不同,实际振荡频率可能与晶体单元的标称频率不同。这个频率差可以通过以下措施来调整:
电路板上的负载电容似乎大于6pF。因此,使用8pF作为负载电容会改变指定的30MHz应时晶体振荡器单元。通过这种改变,实际振荡频率由30MHz降低到5ppm,频率差可以调节,这些方面都是根据自己的需求进行选择。
晶体单元的实际驱动电平超过其指定的最大值。重要的是,压电应时晶振单元的实际驱动水平在驱动水平规格内。过高的驱动电平可能导致更高的振荡频率或更大的R1。请参考下面如何衡量驾驶水平:如果要降低驱动级别,可以采取以下措施:
1、改变阻尼电阻:
通过改变阻尼电阻,反相放大器的输出幅度衰减,实际驱动电平变低。通过这种变化,振荡幅度会减小。因此,最好检查振荡裕量是否超过5倍。此外,应注意不要使振荡幅度过小。
2、改变外部负载电容:
通过改变外部负载电容,由于振荡电路的高阻抗,实际驱动电平变低。在这种情况下,由于负载电容较小,应时晶振的实际振荡频率变高。因此,最好检查实际振荡频率是否在所需的频率范围内。
晶体单元的振荡频率根据其规格中规定的负载电容进行分类。因此,如果实际负载电容与规格中规定的负载电容不同,实际振荡频率可能与晶体单元的标称频率不同。这个频率差可以通过以下措施来调整:
调整外部负载电容。为了改变外部负载电容,实际振荡频率变低。如果外部负载电容较大,请注意振荡裕量会较低。外部负载电容较大时,振荡幅度可能很小。更换不同负载电容的晶振单元。为了应用负载电容大的晶胞,实际振荡频率变高。比如:需要30MHz的频率,用一个指定频率为30MHz的晶振单元作为负载电容,额定频率为6pF。确认实际振荡从30MHz低至30ppm。振荡电路可能无法在晶体单元的标称频率附近工作,这被称为“不规则振荡”,然后根据相关的说明操作即可。

英特尔计划向人工智能芯片初创公司SambaNova追加投资1500万美元,该公司董事会主席由英特尔CEO陈立武担任。
据4月2日消息,台媒《工商时报》此前报道称联发科已开始下调在晶圆代工厂的4nm工艺投片量;而《电子时报》消息进一步指出,高通也已跟进采取类似减产措施。
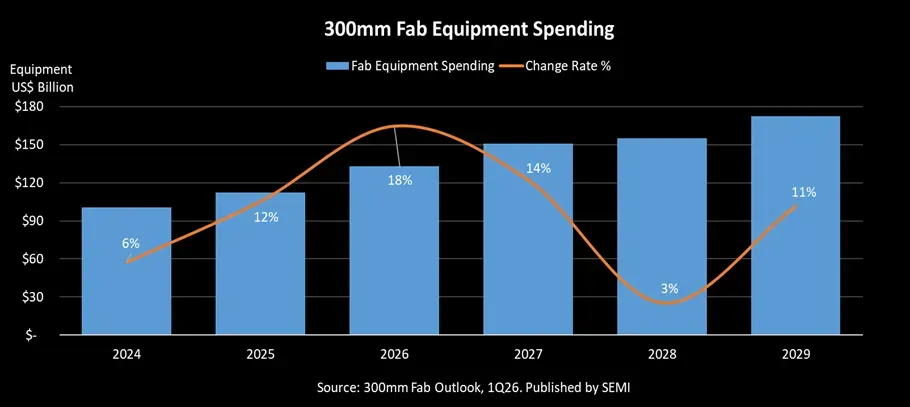
根据SEMI最新发布的《300mm晶圆厂展望》报告,预计全球300mm晶圆厂设备支出将在2026年实现18%的增长,达到1330亿美元,并将在2027年进一步增长14%,至1510亿美元。
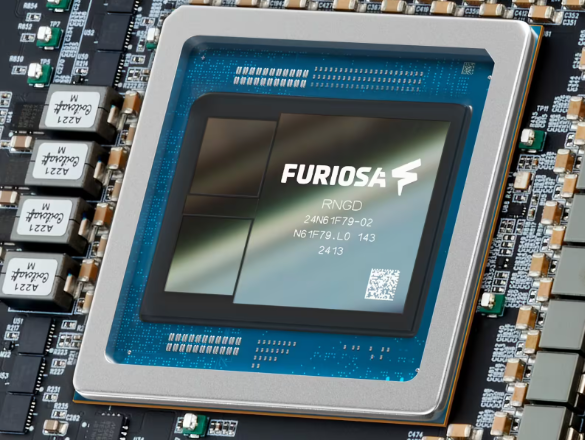
FuriosaAI 的第二代 AI 推理芯片 RNGD 初始配备 48GB HBM3 内存,近期将升级至 72GB HBM3E
受全球智能手机需求走弱影响,供应链已转为防守状态。据供应链相关消息,由于手机市场前景不明朗,手机芯片(SoC)厂商已开始下调投片规模,其中联发科已在晶圆代工厂减少4nm制程芯片的投片量,反映出手机产业链景气度明显降温。



