发布时间:2024-03-18 阅读量:1637 来源: 综合自网络 发布人: wenwei
【导读】步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。
步进电机整机结构简单,可以在宽广的频率范围内实现调速,其转速不受负载大小的影响,过载性好,动作相应快,控制方便,可实现快速起停、正反转控制。下面介绍几种步进电机的控制策略。
控制策略
1、PID 控制
PID 控制作为一种简单而实用的控制方法 , 在步进电机驱动中获得了广泛的应用。它根据给定值 r( t) 与实际输出值 c(t) 构成控制偏差 e( t) , 将偏差的比例 、积分和微分通过线性组合构成控制量 ,对被控对象进行控制 。文献将集成位置传感器用于二相混合式步进电机中 ,以位置检测器和矢量控制为基础 ,设计出了一个可自动调节的 PI 速度控制器 ,此控制器在变工况的条件下能提供令人满意的瞬态特性 。文献根据步进电机的数学模型 ,设计了步进电机的 PID 控制系统 ,采用 PID 控制算法得到控制量 ,从而控制电机向指定位置运动 。最后 ,通过仿真验证了该控制具有较好的动态响应特性 。采用 PID 控制器具有结构简单 、鲁棒性强 、可靠性高等优点 ,但是它无法有效应对系统中的不确定信息 。
目前 , PID 控制更多的是与其他控制策略相结合 , 形成带有智能的新型复合控制 。这种智能复合型控制具有自学习 、自适应 、自组织的能力 ,能够自动辨识被控过程参数 , 自动整定控制参数 , 适应被控过程参数的变化 ,同时又具有常规 PID 控制器的特点。
2、自适应控制
自适应控制是在 20 世纪 50 年代发展起来的自动控制领域的一个分支 。它是随着控制对象的复杂化 ,当动态特性不可知或发生不可预测的变化时 ,为得到高性能的控制器而产生的 。其主要优点是容易实现和自适应速度快 ,能有效地克服电机模型参数的缓慢变化所引起的影响 ,是输出信号跟踪参考信号 。文献研究者根据步进电机的线性或近似线性模型推导出了全局稳定的自适应控制算法 , 这些控制算法都严重依赖于电机模型参数 。文献将闭环反馈控制与自适应控制结合来检测转子的位置和速度 , 通过反馈和自适应处理 ,按照优化的升降运行曲线 , 自动地发出驱动的脉冲串 ,提高了电机的拖动力矩特性 ,同时使电机获得更精确的位置控制和较高较平稳的转速 。
目前 ,很多学者将自适应控制与其他控制方法相结合 ,以解决单纯自适应控制的不足。文献设计的鲁棒自适应低速伺服控制器 ,确保了转动脉矩的最大化补偿及伺服系统低速高精度的跟踪控制性能 。文献实现的自适应模糊 PID 控制器可以根据输入误差和误差变化率的变化 ,通过模糊推理在线调整 PID参数 ,实现对步进电机的自适应控制 ,,从而有效地提高系统的响应时间 、计算精度和抗干扰性 。
3、矢量控制
矢量控制是现代电机高性能控制的理论基础 ,可以改善电机的转矩控制性能 。它通过磁场定向将定子电流分为励磁分量和转矩分量分别加以控制 ,从而获得良好的解耦特性 ,因此 ,矢量控制既需要控制定子电流的幅值 ,又需要控制电流的相位 。由于步进电机不仅存在主电磁转矩 ,还有由于双凸结构产生的磁阻转矩 ,且内部磁场结构复杂 , 非线性较一般电机严重得多 , 所以它的矢量控制也较为复杂 。推导出了二相混合式步进电机 d-q 轴数学模型 ,以转子永磁磁链为定向坐标系 ,令直轴电流 id =0 ,电动机电磁转矩与 iq 成正比 , 用PC 机实现了矢量控制系统 。系统中使用传感器检测电机的绕组电流和转自位置 ,用 PWM 方式控制电机绕组电流 。文推导出基于磁网络的二相混合式步进电机模型 , 给出了其矢量控制位置伺服系统的结构 ,采用神经网络模型参考自适应控制策略对系统中的不确定因素进行实时补偿 ,通过最大转矩/电流矢量控制实现电机的高效控制 。
4、智能控制的应用
智能控制不依赖或不完全依赖控制对象的数学模型 ,只按实际效果进行控制 ,在控制中有能力考虑系统的不确定性和精确性 , 突破了传统控制必须基于数学模型的框架 。目前 , 智能控制在步进电机系统中应用较为成熟的是模糊逻辑控制 、神经网络和智能控制的集成 。
5、模糊控制
模糊控制就是在被控制对象的模糊模型的基础上 ,运用模糊控制器的近似推理等手段 ,实现系统控制的方法 。作为一种直接模拟人类思维结果的控制方式 ,模糊控制已广泛应用于工业控制领域 。与常规控制相比 ,模糊控制无须精确的数学模型 , 具有较强的鲁棒性 、自适应性 , 因此适用于非线性 、时变 、时滞系统的控制 。给出了模糊控制在二相混合式步进电机速度控制中应用实例 。系统为超前角控制 ,设计无需数学模型 ,速度响应时间短 。
6、神经网络控制
神经网络是利用大量的神经元按一定的拓扑结构和学习调整的方法 。它可以充分逼近任意复杂的非线性系统,能够学习和自适应未知或不确定的系统 ,具有很强的鲁棒性和容错性,因而在步进电机系统中得到了广泛的应用 。将神经网络用于实现步进电机最佳细分电流 ,在学习中使用 Bayes 正则化算法 ,使用权值调整技术避免多层前向神经网络陷入局部极小点 ,有效解决了等步距角细分问题 。

英特尔计划向人工智能芯片初创公司SambaNova追加投资1500万美元,该公司董事会主席由英特尔CEO陈立武担任。
据4月2日消息,台媒《工商时报》此前报道称联发科已开始下调在晶圆代工厂的4nm工艺投片量;而《电子时报》消息进一步指出,高通也已跟进采取类似减产措施。
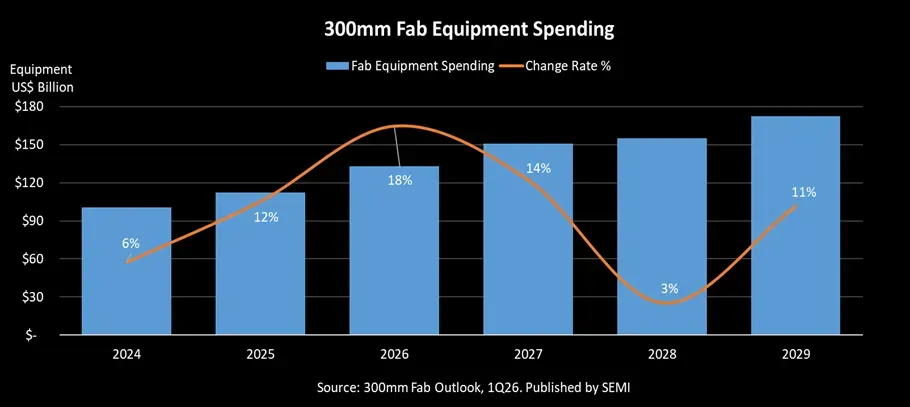
根据SEMI最新发布的《300mm晶圆厂展望》报告,预计全球300mm晶圆厂设备支出将在2026年实现18%的增长,达到1330亿美元,并将在2027年进一步增长14%,至1510亿美元。
FuriosaAI 的第二代 AI 推理芯片 RNGD 初始配备 48GB HBM3 内存,近期将升级至 72GB HBM3E
受全球智能手机需求走弱影响,供应链已转为防守状态。据供应链相关消息,由于手机市场前景不明朗,手机芯片(SoC)厂商已开始下调投片规模,其中联发科已在晶圆代工厂减少4nm制程芯片的投片量,反映出手机产业链景气度明显降温。



