发布时间:2025-02-21 阅读量:3964 来源: 我爱方案网 作者: bebop
HPM6E8Y系列MCU内置RISC-V双核,集成2个以太网PHY收发器,不仅支持EtherCAT从控制器(ESC: EtherCAT Slave Controller),还支持多达3个外部端口的时间敏感网络(TSN: Time Sensitive Networking)千兆以太网交换机,同时拥有32通道高分辨率PWM输出及∑∆数字滤波器,为高精度运动控制系统量身打造出色的硬件平台。HPM6E8Y系列能够确保以太网通信的高度实时响应与极低延迟,完美适用于小空间、大算力、强通信的高性能伺服电机控制、机器人运动控制等工业自动化场景。
扫码可申请免费样片以及获取产品技术规格书
快速验证方案 先楫半导体还提供机器人关节伺服演示系统方案,助力芯片快速验证进程,据了解,搭载HPM6E8Y的关节模组方案,较传统DSP+FPGA架构成本降低35%,体积缩减42%,已在多家头部企业的灵巧手、膝关节模组中完成验证导入。 该方案的特点: 内置HPM6E8Y芯片 支持CiA402(CSV,CSP) 支持FOE(OTA) S曲线 保护功能:过流,过压,欠压,过温,飞车,编码器断线 支持hpm_monitor_studio
产品优势 1. 全链路的高带宽、高实时性通信 机器人的运动控制需要兼顾通信的高实时性及高带宽,以确保机器人能够迅速响应外部指令和环境变化。HPM6E8Y系列通过内置的SOC高速总线扩展EtherCAT从站控制器,提供卓越的通信数据带宽,完美满足了从运动控制器到执行器之间的全链路高速通信需求,确保数据传输的高效与流畅。 2. 高度集成化 机器人发展的一个重要趋势是小型化,鉴于各类电子控制系统的空间有限,需要严格控制电路板PCB的面积。HPM6E8Y系列MCU芯片在提供小尺寸封装的同时,片上集成了各类模拟数字接口,甚至集成了通讯接口的物理层收发器,如Ethernet PHY等,可以有效减少外部器件使用,减小PCB尺寸。 3. 精确控制感知系统 伺服电机的精准控制得益于先进的控制感知系统,是实现机器人精确运动和操作的关键。HPM6E8Y系列内置领先的外设,如拥有100ps的高分辨率PWM模块,集高速转换和高分辨率于一体的16位ADC,Sigma-Delta滤波器,以及片上DAC,运算放大器,高速比较器等,为运动控制的执行和感知提供坚实的保障。 4. 高算力,低功耗 机器人运作需要处理大量的传感器数据,并运行复杂的运动控制算法。HPM6E8Y系列主频高达600 MHz,其性能表现卓越达到了3390 CoreMark™的基准测试分数,同时还具备1710 DMIPS的处理能力,能够支持高强度的数据处理和算法运行,并且在保证性能的同时,实现低功耗设计,以延长使用寿命或降低能耗。 典型应用 仿生机械狗关节、教育机器人手臂等需要低延迟、中等精度的场景。HPM6E8Y系列增强的运算能力与资源容量为复杂算法提供硬件支持。 扫码可申请免费样片以及获取产品技术规格书


在边缘计算场景中,算力与实时性的平衡始终是技术演进的核心课题。
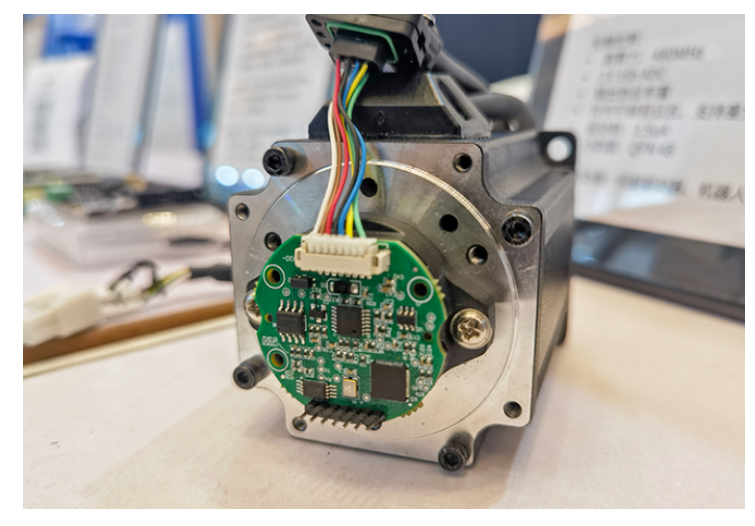
磁电式编码器消除了易损的光学部件和复杂的绕组结构,其固态设计带来了更长的平均无故障时间(MTBF)与更低的生命周期维护成本。

EtherCAT 网络可连接多达 65535 个设备,网络容量几乎没有限制,可以将模块化的 I/O 设备设计为每个 I/O 片都是一个独立的 EtherCAT 从站
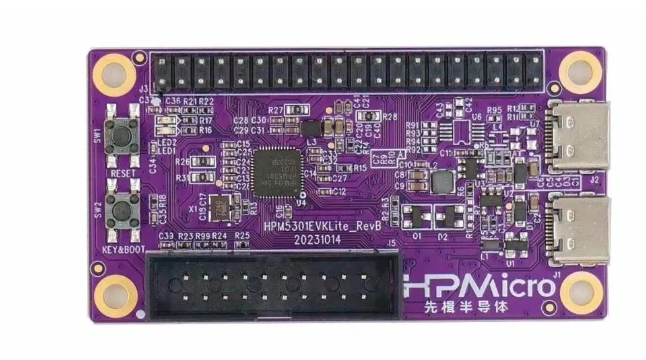
先楫HPM5301秉承了先楫半导体一贯的高性能特性及架构,在性能上做到了极大的突破。
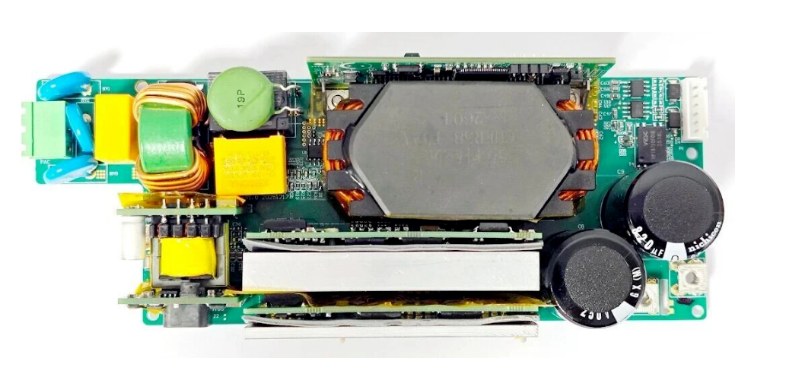
方案采用两相交错无桥图腾PFC拓扑,工作于CCM(连续导通模式),峰值效率>99%



