发布时间:2025-08-29 阅读量:3103 来源: 我爱方案网 作者: bebop
在工业自动化、机器人、3D打印等领域,步进电机和伺服电机是最常见的两种驱动设备。许多工程师和技术爱好者在项目选型时,常常纠结于两者的差异。
步进电机以其极低的系统成本(仅伺服电机的1/2至1/10)和简化控制结构,成为预算受限项目的理想选择。其价格优势源于开环控制无需编码器反馈,且驱动电路简单,但代价是精度有限(误差±3%–±5%)和高速性能不足。相反,伺服电机通过闭环系统和高性能组件(编码器、复杂算法)实现纳米级定位和毫秒级响应,但系统成本较高。
这种成本差异映射到应用场景:步进电机适用于对成本敏感且负载稳定的设备(如桌面CNC机床、阀门控制);伺服电机则用于高动态响应、变负载或需要抗干扰的场景(如新能源汽车驱动、卫星跟踪系统)。
下文我爱方案网分析师将详细介绍步进电机和伺服电机的技术优势及应用场景差异,并分享一些已量产的实战案例及其技术实现方式,以作参考。
扫码可申请免费样片及方案技术规格书
以下是步进电机和伺服电机的技术优势及应用场景对比表格:
应用场景对比:
高性能驱动HPM6750芯片
HPM6750采用双RISC-V内核,主频达816MHz ,凭借先楫半导体的创新总线架构、高效的L1缓存和本地存储器,创下了MCU 高于 9000 CoreMark和 4500以上 的DMIPS性能新纪录,创造了RISC-V 全球主频和跑分新纪录。除了高算力RISC-V CPU,HPM6700系列产品还创造性地整合了一系列高性能外设:包括支持2D图形加速的显示系统、高速USB、千兆以太网、CAN FD等通讯接口,高速12位和高精度16位模数转换器,面向高性能电机控制和数字电源的运动控制系统。
扫码可申请免费样片及方案技术规格书

在上篇我们完成了 BLC、LSC、AWB 及 CCM 的客观标定、建立科学成像基准的基础上,本文将延续 ISP 调试流程,依次进行主观画质调试、IQ 文件配置与常见问题排查,直至实现全流程闭环落地。
瑞芯微RV1126B夜视摄像头方案集成新一代AI双ISP(图像信号处理)模块、夜视算法,具备强大的图像处理与硬件加速能力
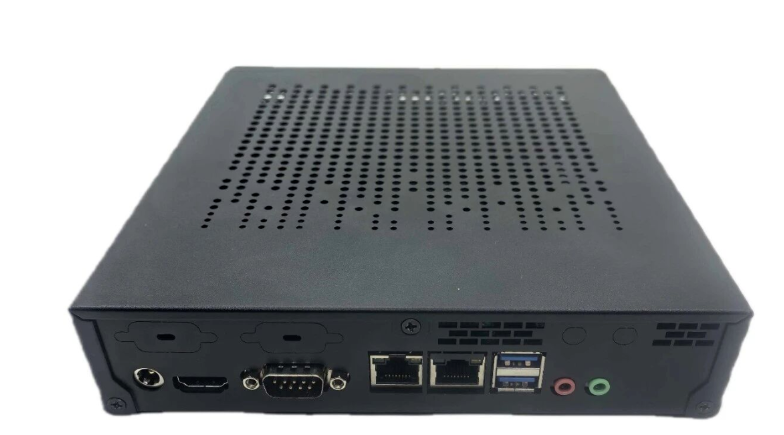
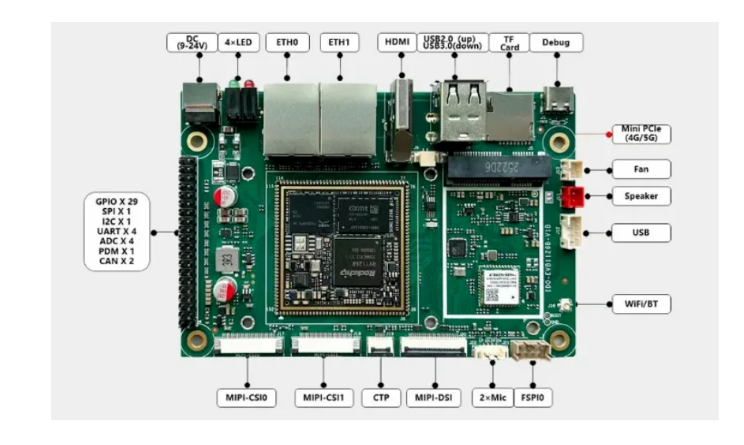
龙芯 2K3000/3B6000M MINI工控盒子,以龙芯八核自主 SoC为核心,打造全自主、小体积、强接口、高可靠的工业级计算平台
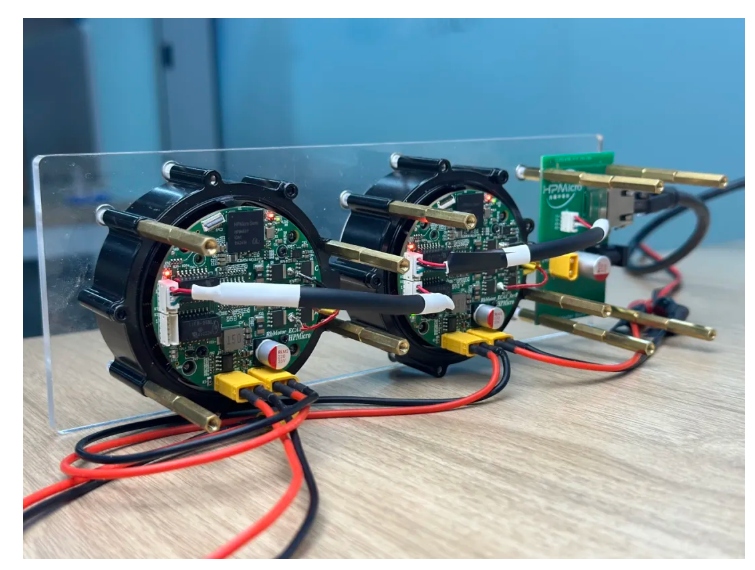
高性能MCU凭借高主频、DSP指令与硬件加速器,单芯片即可完成多轴伺服、观测器及非线性控制,解决了计算瓶颈与实时性问题

编码器作为设备的“精度心脏”,其性能直接决定了设备的定位准度、运行稳定性,甚至使用寿命。



