发布时间:2025-10-9 阅读量:686 来源: 发布人: suii
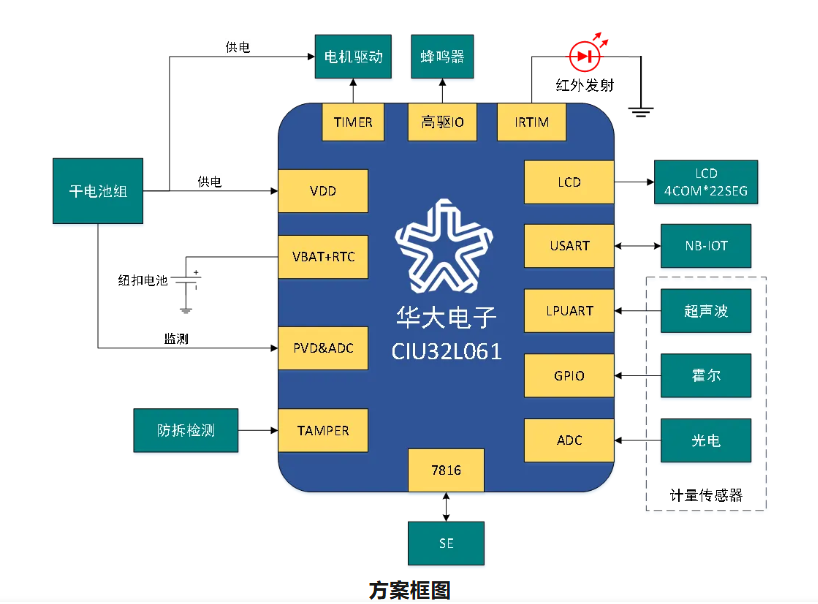
智能燃气表是在普通燃气表的基础上,增加了通信和计量技术,使得燃气表具备了自动抄表、数据传输、智能监测等多种新功能
瑞芯微RK3506核心板宽温级59元/工业级68元,一件也是含税批量价

瑞芯微RK182X系列采用创新的3D堆叠封装技术,将高性能DRAM直接堆叠在计算芯片之上,实现了理论高达1TB/s的片上内存带宽。
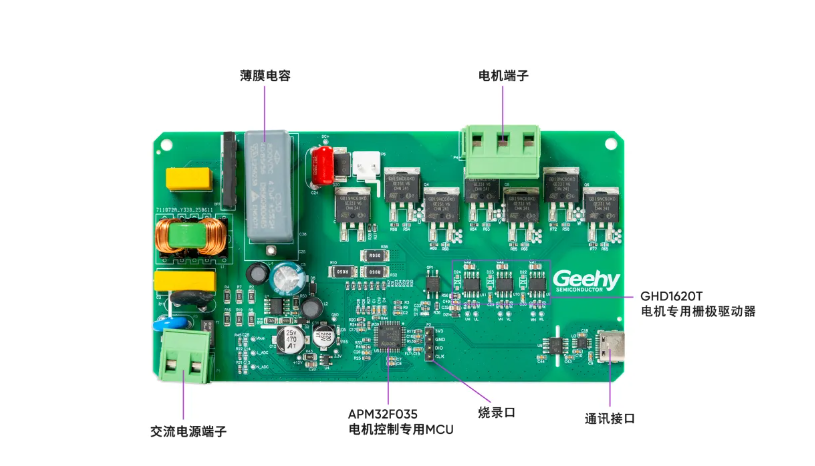
薄膜电容器单体电压最高可达20kV,在中高压变频应用中无需考虑串联问题

RK3576/3588均配备独立NPU,可并行处理多轴运动学解算、轨迹规划与视觉识别,算力较传统控制器提升5倍以上,为1ms控制周期提供保障。



