发布时间:2026-01-15 阅读量:1256 来源: 发布人: suii
当RK3576凭借其四核A72与四核A53的强劲处理核心,结合GPU、VPU与NPU协同加速能力,正推动高性价比机器人开发进入新阶段。我们已成功将完整的Ubuntu 22.04系统及ROS2 Humble生态移植至此国产芯片平台,构建出稳定、全功能的机器人软件开发基础。现在,诚邀您一同探索其卓越性能与开放生态赋予机器人创新的更多可能!

一、系统启动与基础性能展示
1. 硬件平台简介
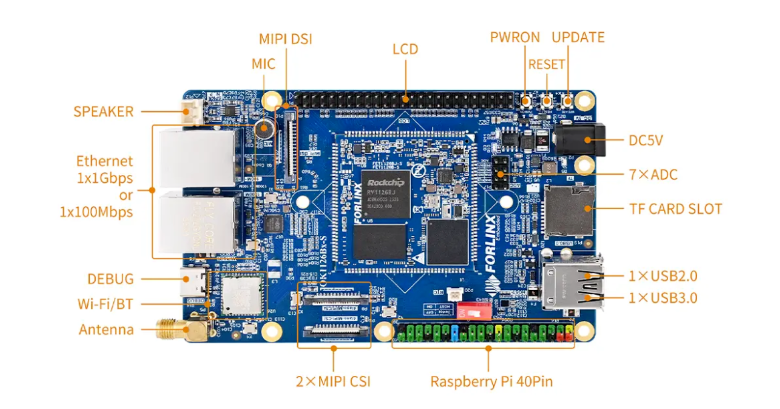
· 开发板:MYD-LR3576
· 存储:eMMC 64GB
· 内存:8GB LPDDR4
· 登录信息:root/123456 或 myir/123456
2. 系统基本信息
· 版本:Ubuntu 22.04.5 LTS
· 启动速度:HDMI 3秒显示Logo,25秒进入桌面
3. 资源占用实测
磁盘使用情况:

内存状态:

CPU负载情况:
8核CPU在空闲状态下利用率接近0%,系统响应迅速。
4. 桌面环境展示
默认搭载轻量级Xfce4桌面,简洁流畅。
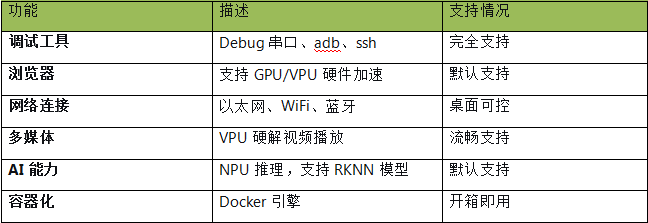
5. 系统功能介绍
二、ROS2核心功能测试
1. 环境验证

确认运行ROS2 Humble长期支持版,生态完整。
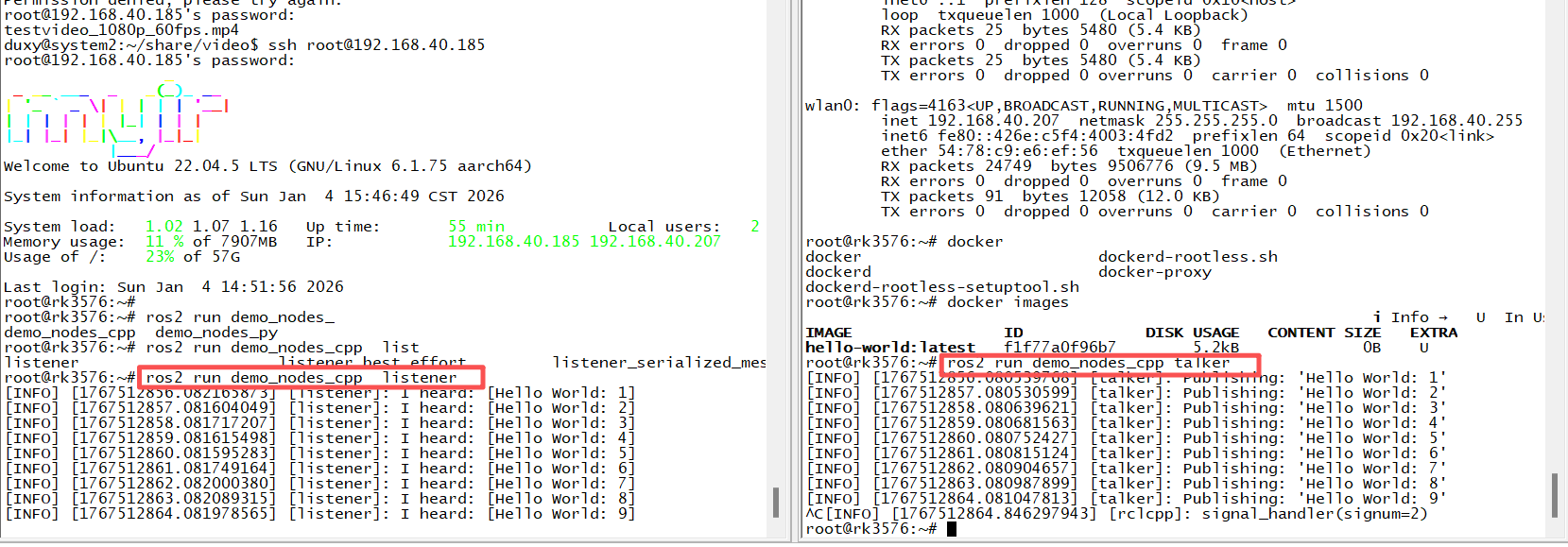
2. 通信测试
话题发布/订阅:C++与Python节点通信正常,跨终端交互流畅。
· 使用C++演示
左边窗口ssh登陆,订阅模式; 右边窗口debug连接,话题发布
· 使用Python演示

3. 性能表现

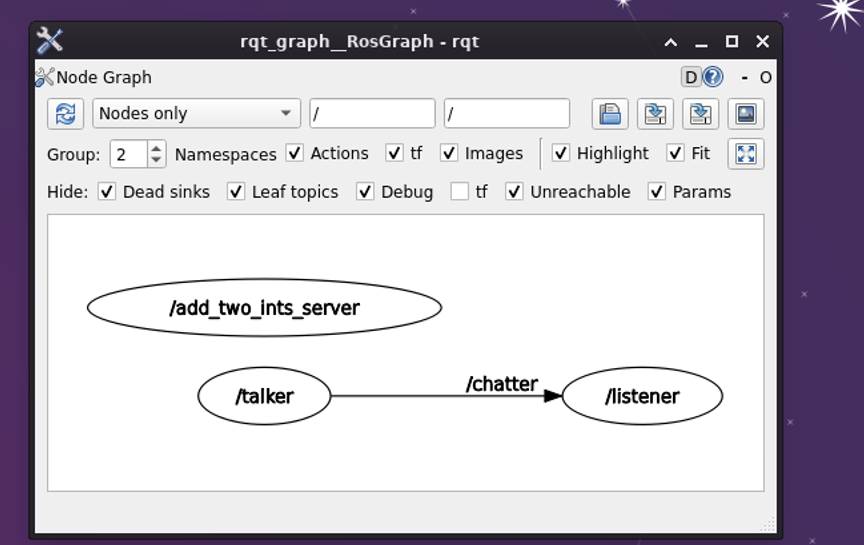
4. 可视化工具
rqt_graph:清晰展示节点拓扑,系统架构一目了然。
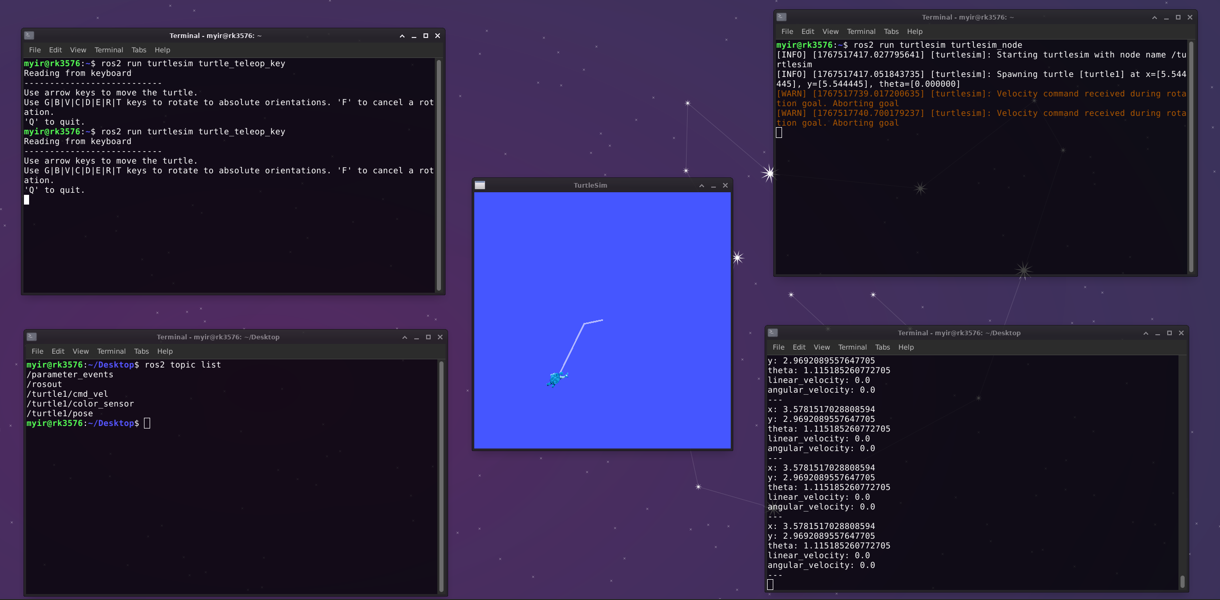
5.小乌龟-Turtlesim经典演示
终端1 启动”小乌龟”

终端2 开启 键盘控制

终端3 开启查看活跃话题

终端4 查看乌龟实时位置

三、RVIZ2三维可视化实战
1. 启动与界面
启动命令

界面
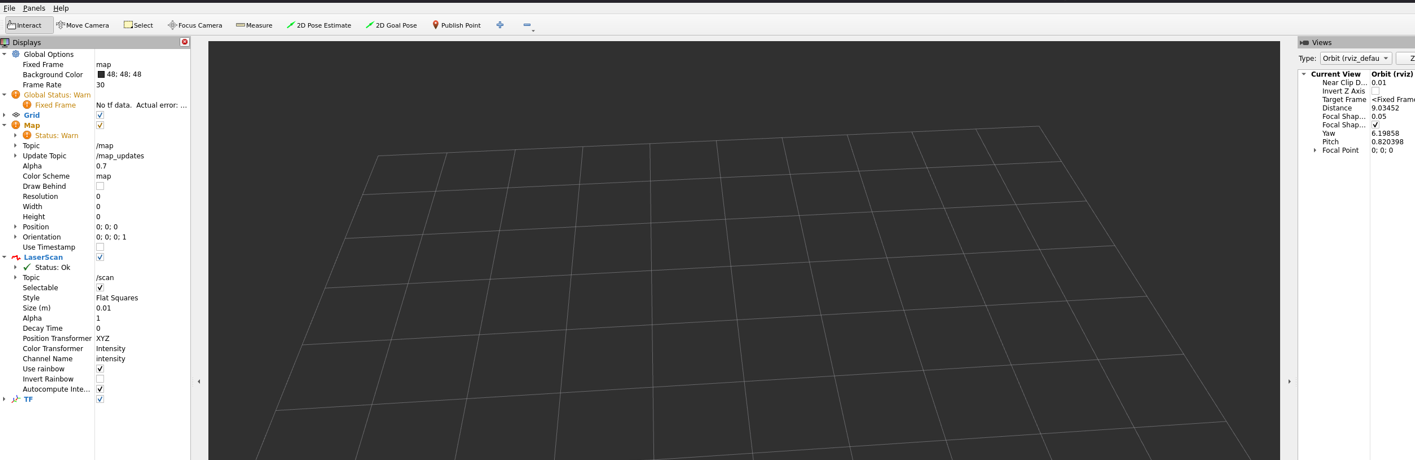
成功启动RVIZ2,界面加载完整,支持3D可视化交互。
2. 机器人模型加载

3. 性能实测
· 2K分辨率全屏:CPU占用约60%
· GPU负载:36%@700MHz
· 渲染体验:操作流畅,视角切换无卡顿
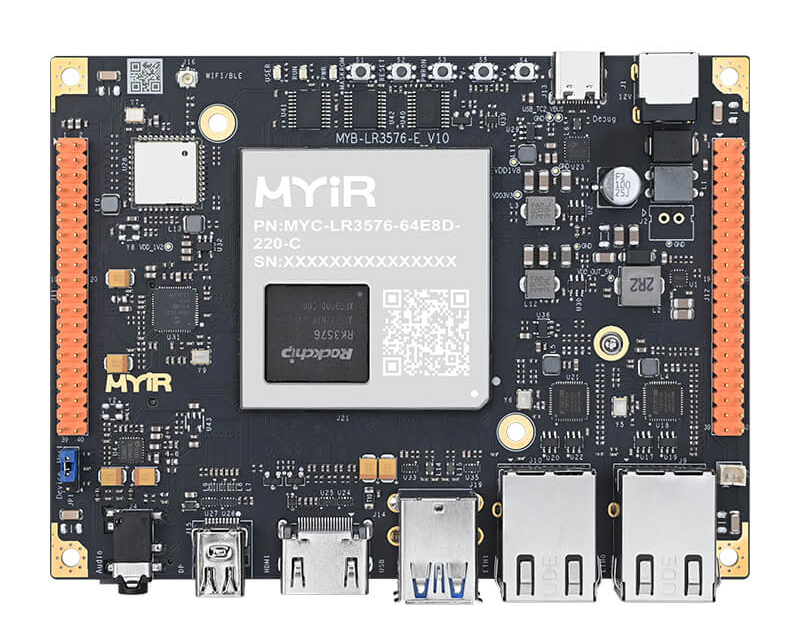
图:基于RK3576开发板
四、总结与展望
RK3576平台完全具备运行完整ROS2生态的能力,性能满足:
· 机器人算法开发与调试
· 三维可视化与仿真
· 多传感器数据融合处理
· 教育实验与原型验证
核心优势
1. 国产化价值:全链路自主可控,助力机器人领域国产替代
2. 成本优势:千元级开发板实现完整ROS2开发环境
3. 功耗表现:典型场景功耗优于同性能x86平台
4. 生态完整:Ubuntu + ROS2 + 丰富外设驱动
未来计划
· 进一步优化GPU驱动,提升3D渲染性能
· 集成SLAM、导航等实际机器人应用栈
· 推动在AGV、服务机器人等场景的落地应用
给开发者的建议
· 推荐场景:
· 高校机器人课程教学平台
· 机器人算法研究与原型验证
· 轻量级机器人产品开发
· 注意事项:
· 建议使用SSD或高速TF卡提升IO性能
· 复杂3D场景可适当降低渲染质量
· 多节点应用注意内存分配优化

EtherCAT 总线凭借高速实时、拓扑灵活的优势成为运动控制领域的主流选择,而双路 EtherCAT 主站控制器更是能满足复杂产线的多场景分区控制需求

方案集成星闪SLE模组,10路UART与2路CAN FD,成本更低,含税单价仅98元
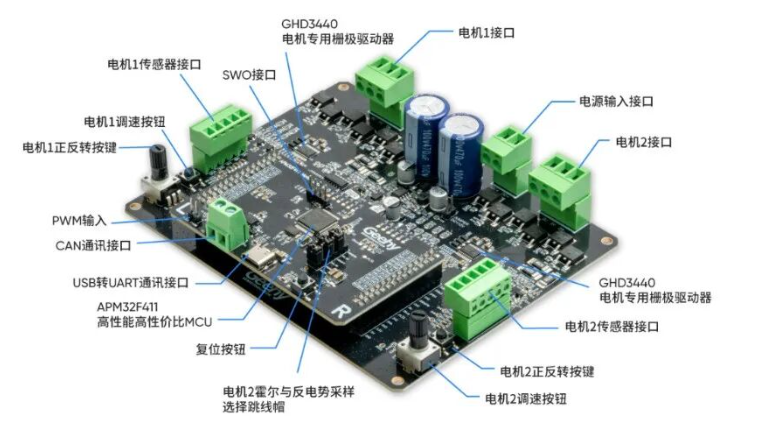
方案集成两个高级定时器,每个高级定时器可输出三路带死区的互补 PWM,实现单芯片驱动两路BLDC 或 PMSM
毫米波雷达人体感应模组通过智能算法可精准区分人体与其他运动物体(如宠物、窗帘摆动),大幅降低误报率。
RV1126B芯片内置专用的硬件拼接模块,依靠硬件完成图像融合,大幅降低CPU与内存资源占用,适配低功耗边缘视觉场景。



