发布时间:2026-01-29 阅读量:2135 来源: 我爱方案网 作者: bebop
传统工业机械臂功能单一,一些低端MCU即使主频较低也可满足需求,但人形机器人和一体化智能关节臂等复杂系统对算力要求极高,一个灵巧手就需要处理多个关节、力觉和视觉SLAM等任务,瞬时算力需求巨大,加上AI处理的需求,传统MCU架构已难以应对。
另外,机器人关节驱动对于其PCBA体积敏感,所以其采用芯片多为较小封装,且电机驱动通常设计为一板拖多电机的形式,这对于MCU的处理能力会有较大的要求,一般要求其具有主频150MHz以上的算力。
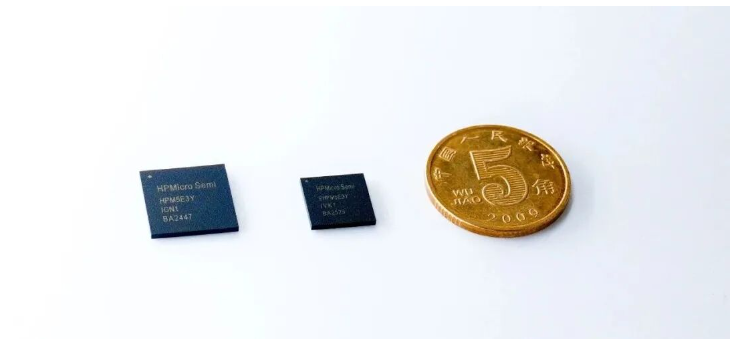
针对需求日益高涨的机器人市场,我爱方案网平台推荐先楫全新机器人关节专用MCU——HPM5E3Y,芯片内置EtherCAT控制器和PHY,兼具高算力、高集成度、实时通信等优势,同时体积非常小,最小封装只有9×9毫米,非常匹配机器人关节空间有限、设计紧凑的要求,并推荐基于该芯片开发的机器人关节伺服演示系统方案,助力芯片快速验证进程。

扫码可申请免费样片以及获取产品技术规格书

具体性能方面,HPM5E3Y系列MCU采用高实时性RISC-V内核,主频达480MHz,内置512KB RAM和1MB Flash闪存,片上集成2个以太网PHY收发器,配置EtherCAT从站控制器 (ESC: EtherCAT Slave Controller),千兆以太网口,以及16路高分辨率PWM输出,Σ∆ 数字滤波和高精度运动控制系统, 可以在工业自动化领域实现基于高实时性、低延时的以太网总线的高压/低压伺服、步进伺服、远程 IO、传感器和通讯模块等应用。
同时,该系列提供196 BGA和121 BGA两种灵活封装形式,其中196BGA封装与HPM6E8Y的相同封装实现硬件引脚兼容,可以在2个系列间实现无缝替换,而121BGA封装则是业界同类型方案中领先的小尺寸、高集成度产品。
产品性能
主频 480MHz,高性能RISC-V内核
512KB RAM,1 MB FLASH
EtherCAT 从站控制器,支持 3个端口
集成 2个百兆以太网 PHY
1个千兆以太网 MAC控制器
16通道 100ps 高精度 PWM
支持运动传感器接口,增量式位置传感器接口和磁编码器接口
支持可编程逻辑单元 PLB
4个 CAN/CAN-FD接口
2个 2MSPS 16位高精度 ADC
1个 4通道 ΣΔ滤波器
196 BGA,12x12,0.8 pitch
121 BGA,9x9,0.8 pitch
工作温度:-40 ~ 105˚C TA
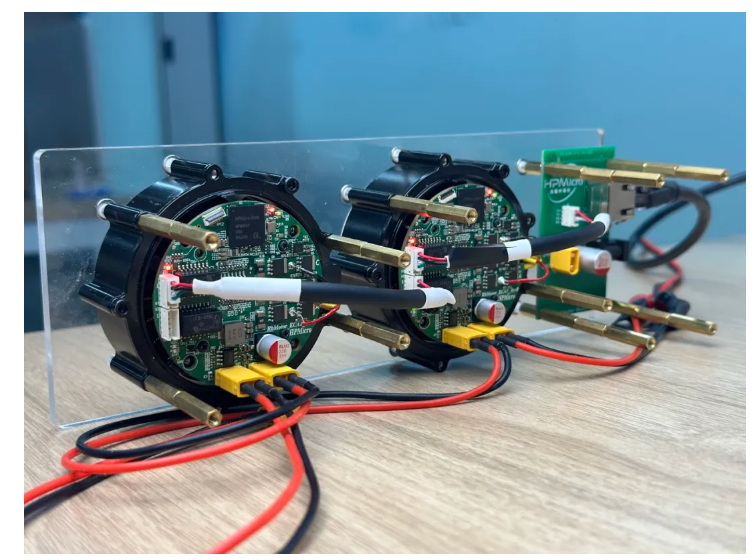
HPM5E3Y 方案Demo
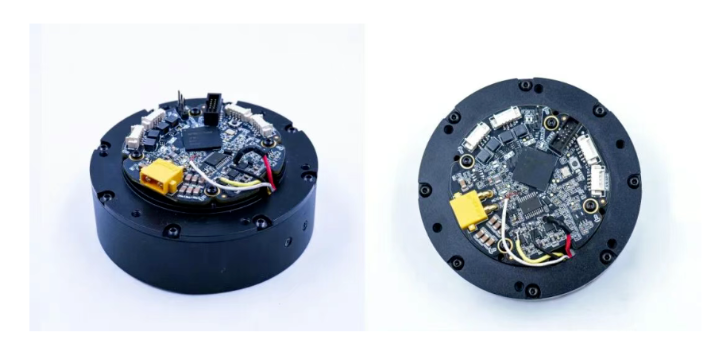
方案为基于HPM5E3Y的关节伺服解决方案,以RISC-V架构的单芯片集成EtherCAT通信与实时控制。该方案将高性能MCU芯片与电机驱动电路、编码器、减速器高度集成,体积更小、集成度更高,可灵活适配协作机器人的紧凑关节设计,降低整机身重量。同时,提供开源的软硬件设计文档资料,支持用户基于芯片自定义控制算法,兼容多场景二次开发。
我爱方案网另外推荐升级版机器人关节电机专用控制系列芯片先楫HPM6E8Y,主频600MHz,集成2个以太网PHY收发器,内置4M flash,支持EtherCAT从控制器,满足机器人控制实时响应通信需求及小型化应用。

先楫HPM6E8Y内置:RISC-V双核,4M flash。更加简洁的电路设计,可减小控制板体积,适用于机器人各类关节电机及车轮电机,利于节约空间,便于集成化系统开发;6E8Y还集成了增加内置2个PHY,不仅支持EtherCAT从控制器(ESC: EtherCAT Slave Controller),还支持多达3个外部端口的时间敏感网络(TSN: Time Sensitive Networking)千兆以太网交换机,同时拥有32通道高分辨率PWM输出及∑∆数字滤波器,为高精度运动控制系统量身打造出色的硬件平台。
快速验证方案
先楫半导体提供机器人关节伺服演示系统方案,助力芯片快速验证进程。
该方案的特点:
内置HPM6E8Y芯片
支持CiA402(CSV,CSP)
支持FOE(OTA)
S曲线
保护功能:过流,过压,欠压,过温,飞车,编码器断线
支持hpm_monitor_studio
扫码可申请免费样片以及获取产品技术规格书


EtherCAT 总线凭借高速实时、拓扑灵活的优势成为运动控制领域的主流选择,而双路 EtherCAT 主站控制器更是能满足复杂产线的多场景分区控制需求

方案集成星闪SLE模组,10路UART与2路CAN FD,成本更低,含税单价仅98元
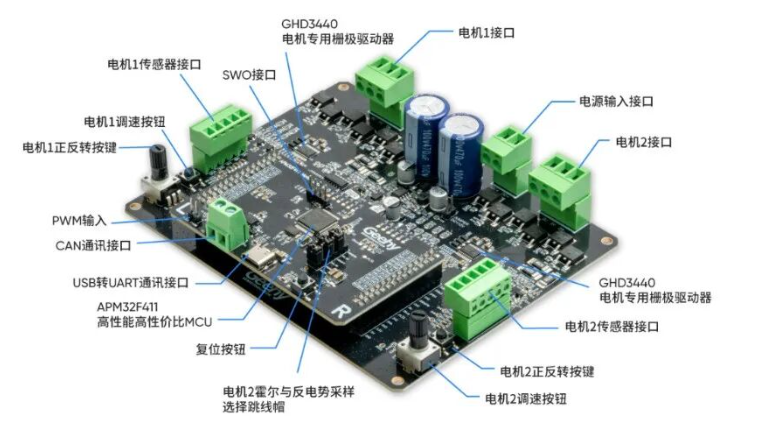
方案集成两个高级定时器,每个高级定时器可输出三路带死区的互补 PWM,实现单芯片驱动两路BLDC 或 PMSM
毫米波雷达人体感应模组通过智能算法可精准区分人体与其他运动物体(如宠物、窗帘摆动),大幅降低误报率。
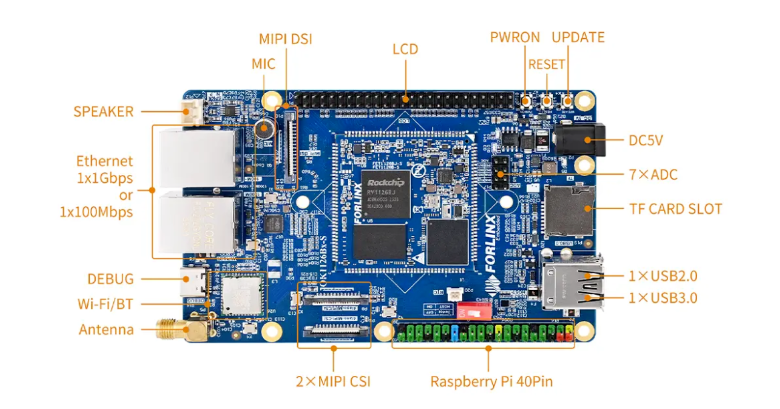
RV1126B芯片内置专用的硬件拼接模块,依靠硬件完成图像融合,大幅降低CPU与内存资源占用,适配低功耗边缘视觉场景。



