发布时间:2026-04-16 阅读量:14211 来源: 发布人: suii
在机器人系统中,时间基准并非仅用于“提供频率”,而是贯穿于控制闭环、通信同步、数据采集与时间对齐等各个环节的底层基础。一旦时钟发生温漂、抖动或相位噪声劣化,其影响将在系统链路中被逐级放大,并最终表现为控制精度出现误差、通信不稳定及定位偏差等一系列问题。
我爱方案网推荐温补晶振(TCXO)与压控温补晶振(VCTCXO),通过ppm级频率稳定度与低相位噪声,为机器人系统提供工程级可靠的时间参考。
一、时钟误差放大链路:从微偏差到整机性能损耗
机器人关键性能依赖三类时间指标,任何一项劣化都会引发连锁问题:
• 频率准确度(ppm):决定长期误差(如定位、同步偏移)
• 短期稳定度/抖动(Jitter):决定采样与控制瞬时精度
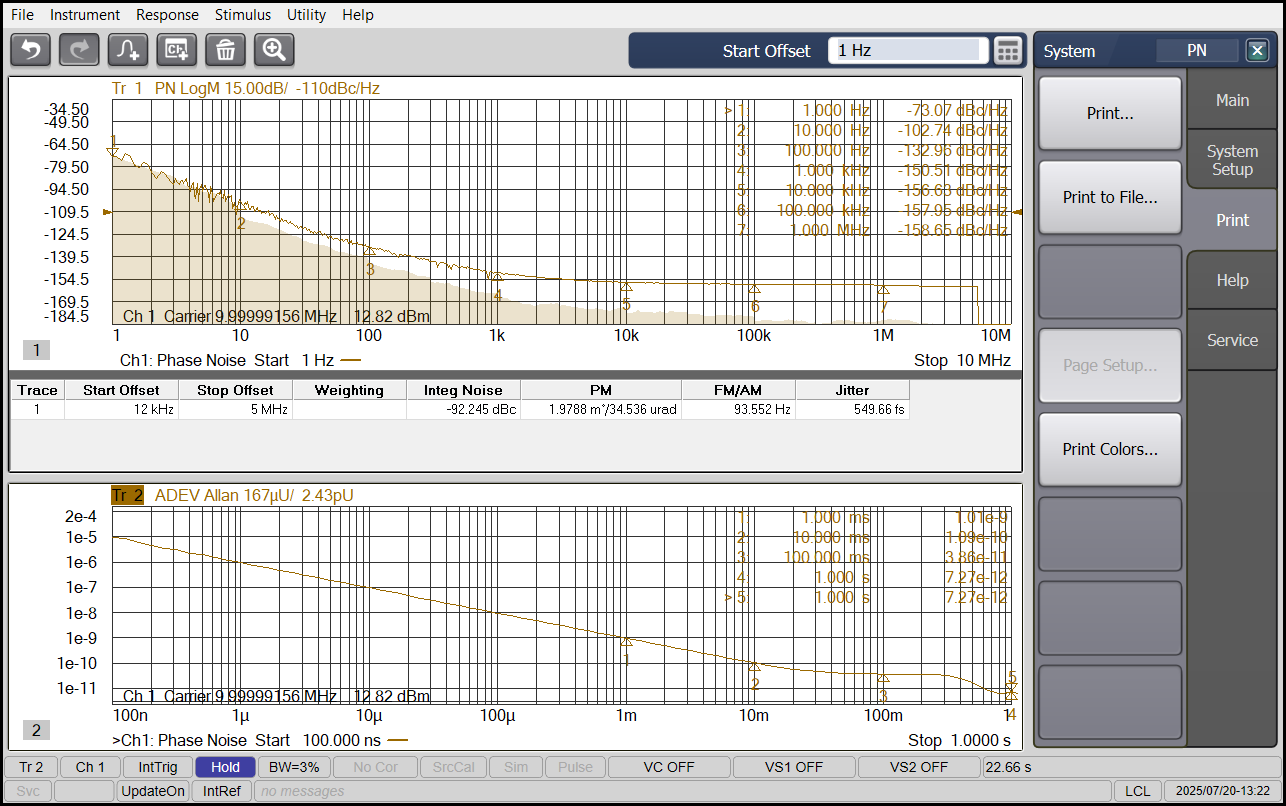
• 相位噪声(Phase Noise):决定通信链路质量与频谱纯度
在机器人复杂系统中,这些误差会通过控制环路、采样系统与通信链路逐级放大,而TCXO能够以高精度时钟基准,从源头截断误差传导,实现整机性能跃迁。
二、机器人四大核心模块:温补晶振的工程级影响
1. 主控与运动控制系统(MCU / SoC /伺服控制)
机器人控制系统依赖固定周期执行PID或模型预测控制(MPC):
• 若使用普通晶振(温漂±10~20ppm):
①时钟温漂导致控制周期不稳定,会直接改变系统闭环相位裕度
②最终表现为:机械臂抖动、轨迹偏差大、重复定位精度降低
• 采用高精度TCXO(≤0.05ppm):
①控制周期高度稳定,闭环参数一致性更强
②能够提升多轴同步精度,尤其在高速联动场景
推荐方案
高精度温补晶振YSO510TP,适用于高端运动控制与多轴协同
2. 无线与有线通信模块(5G / Wi-Fi /工业以太网)
通信系统对晶振相噪极为敏感,主要影响机器人通信的误差矢量幅度(EVM):
• 若相噪较高(>-140dBc):
①星座图扩散,误码率上升
②在64QAM/256QAM等高速通信模式下更加明显
• 若使用低相噪TCXO(最低-150dBc@1khz):
①能够提升信号纯度,降低EVM
②可增强复杂电磁环境下通信稳定性
推荐方案
• YSO512ET系列(超高精度、低相噪)
• YSV350TP系列(VCTCXO,支持AFC/PLL调频补偿)
3. 传感器与融合系统(IMU / LiDAR / Camera)
多传感器融合高度依赖时间对齐:
• 若时钟抖动或漂移:
①IMU积分误差增大(角速度/加速度积分偏移)
②LiDAR点云与视觉帧错位
③融合算法(EKF/UKF)收敛变差
• 高稳定TCXO能够带来的改进:
①降低采样抖动
②提高时间戳一致性
推荐方案
• YSO510TP / YSO512ET(高精度温补晶振)
4. 定位与时间同步系统(GNSS / RTK / PTP)
GNSS定位误差与时间误差直接相关:
• 1ppm频率误差≈1μs时间误差
• 1μs时间误差≈300m距离误差
虽然实际系统有校正机制,但晶振稳定度直接影响收敛速度与保持能力
• 低精度晶振:易失锁、重捕获时间长、定位漂移明显
• 高精度TCXO/VCTCXO:提升锁定稳定性、提高RTK解算成功率
推荐方案
• YSO510TP(高精度基准)
• YSV350TP(支持频率微调,适配同步系统/PLL)
三、温补晶振方案:铸就机器人高性能内核
围绕机器人高稳定、高可靠性的需求,温补晶振具备:
• 高频率稳定度:最高0.05ppm,应对温漂与长期误差
• 低相位噪声:最低-150dBc@1khz,优化通信与信号质量
• 封装可靠性:金属上盖+陶瓷基座,能够抗冲击、抗老化
• 尺寸覆盖:1612~7050,适配紧凑与标准设计
• VCTCXO能力:支持系统级频率校准(AFC/PLL闭环)
高精度温补晶振:YSO510TP系列
适用模块:机器人主控与运动控制系统、传感器与融合系统、定位与时间同步系统
主要参数:
• 频率范围:10 - 52MHz
• 封装尺寸:1612~7050,最小尺寸1612,满足机器人小型化封装需求
• 频率温度频差:±0.28/0.5/1.5/2.5PPM
• 低相位噪声:最低-150dBc@1khz
高稳定性压控温补晶振:YSV350TP系列
适用模块:机器人无线与有线通信模块、定位与时间同步系统
主要参数:
• 频率范围:6.4 - 60MHz
• 封装尺寸:2016~7050
• 频率稳定度:±0.5ppm(available)
• 相位噪声:-148dBc/Hz @ 10KHz offset
超高精度温补晶振:YSO512ET系列
适用模块:机器人无线与有线通信模块、传感器与融合系统
主要参数:
• 频率范围:10/12/12.8/19.2/20/24.576/25/30/32/40/48/50MHz, or specify
• 封装尺寸:5032、7050
• 频率稳定度:±0.1ppm(available)

EtherCAT 总线凭借高速实时、拓扑灵活的优势成为运动控制领域的主流选择,而双路 EtherCAT 主站控制器更是能满足复杂产线的多场景分区控制需求

方案集成星闪SLE模组,10路UART与2路CAN FD,成本更低,含税单价仅98元
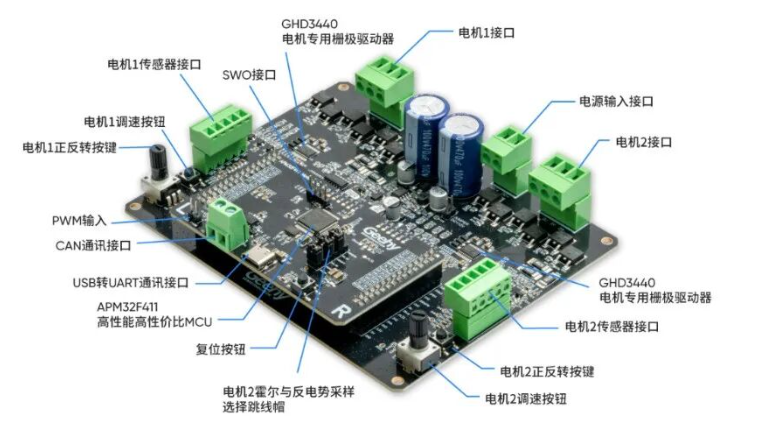
方案集成两个高级定时器,每个高级定时器可输出三路带死区的互补 PWM,实现单芯片驱动两路BLDC 或 PMSM
毫米波雷达人体感应模组通过智能算法可精准区分人体与其他运动物体(如宠物、窗帘摆动),大幅降低误报率。
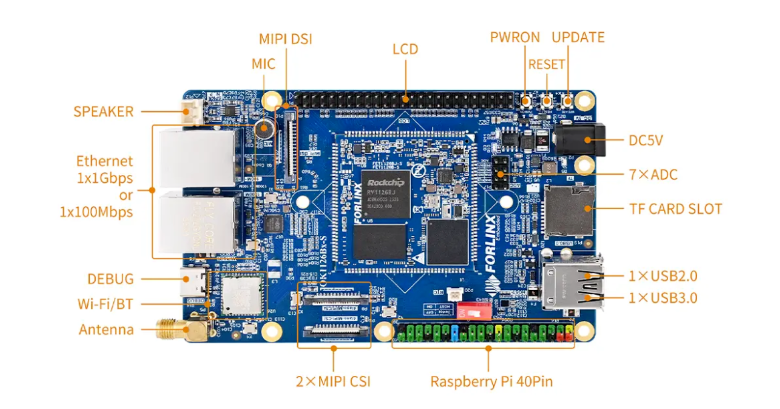
RV1126B芯片内置专用的硬件拼接模块,依靠硬件完成图像融合,大幅降低CPU与内存资源占用,适配低功耗边缘视觉场景。



