发布时间:2026-04-16 阅读量:21408 来源: 发布人: suii
在工业控制场景中,芯片间的高速数据交互是一个关键需求,而传统方案往往在效率与成本上面临两难:一方面,串口或网络等协议传输速度有限,难以满足实时性要求;另一方面,基于共享内存的架构虽可提供高带宽,但硬件复杂、引脚占用多,整体成本较高。RK3506核心板集成的DSMC接口,为这一矛盾提供了新的解决思路——通过 Local Bus 协议,用少量引脚实现跨芯片的高速地址空间访问。
本文基于 MYD-YR3506 Host + MYD-YR3506 Slave的实板联调验证,确认DSMC Local Bus链路能够稳定建立,并在 512B、8-bit模式持续压测中达到了 16.77 GB 累计校验数据量、误码率为0的结果。DSMC 在 RK3506核心板(MYC-YR3506) 的Local Bus应用场景下已具备明确的工程应用价值——既能承担寄存器通知与控制交互,也能提供可重复验证、可量化性能的数据访问通道。
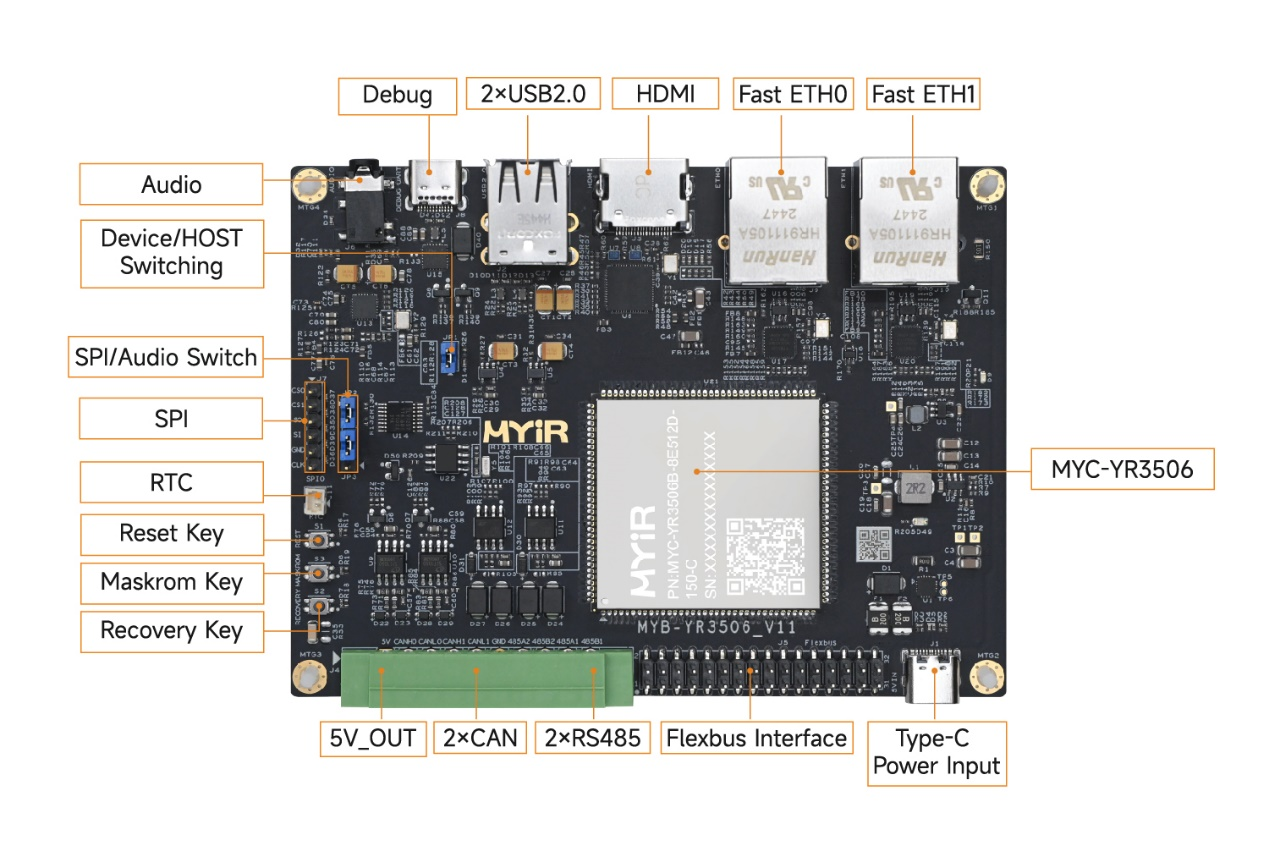
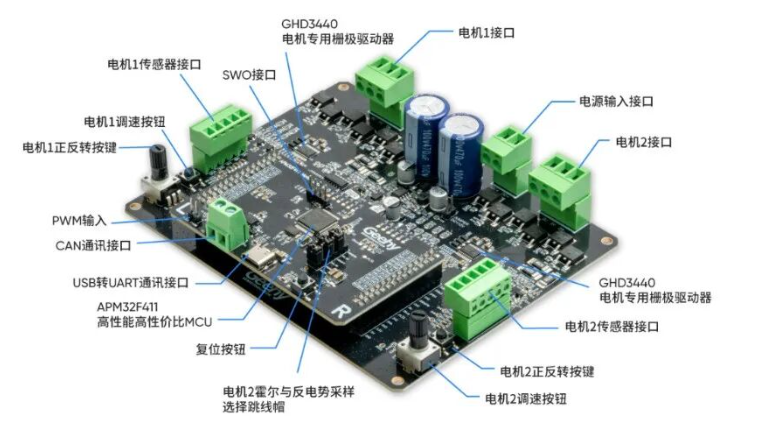
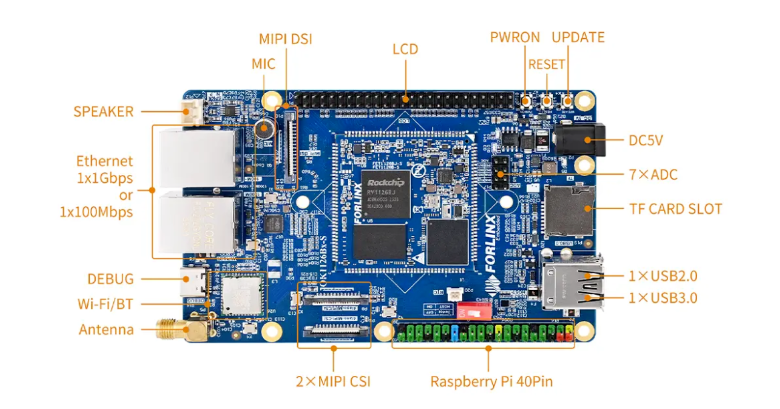
图:基于RK3506核心板开发板
第一章:DSMC是什么?
名词预先了解
DSMC:Double Data Rate Serial Memory Controller,双倍速率串行存储器控制器
Local Bus:DSMC的一种应用模式,用于与另一颗 Rockchip 芯片的 Slave DSMC 组成主从访问链路
PSRAM:DSMC的另一种模式,作为存储器控制器为系统提供外部存储空间
CS / region:CS为片选(最多4个),region为CS下的访问窗口(每个CS可分1/2/4个region)
DSMC 全称 Double Data Rate Serial Memory Controller,用于实现Host侧对外部从设备地址空间的访问。它采用命令、地址、数据线分时复用的方式,并支持DDR(双沿)数据传输,核心优势:引脚数量少、带宽较高。
在 RK3506核心板(MYC-YR3506)平台上,DSMC有两种典型用法:

本文重点介绍 Local Bus 模式。DSMC接口支持x8 和x16 两种位宽,同一CS下的位宽必须统一,属于接口设计阶段需要首先确定的基础参数。
1.1 DSMC 的系统定位
DSMC 既不是普通内存,也不是上层通信协议,而是一条面向对端地址空间的硬件访问通道:

1.2 DSMC vs 常见访问方式

核心区别:Host 与 Slave 运行在独立地址空间和独立内存系统中,数据通过硬件链路、FIFO 和寄存器机制完成传递,而非通过共享地址空间直接访问。
第二章:Local Bus 空间模型
2.1 两个基本维度
DSMC 的地址空间组织围绕两个维度展开:
CS(片选):CS0~CS3 共4个片选入口,每个CS可连接一个从设备
region(访问窗口):当外设类型为 Local Bus 时,一个CS 的访问空间可以继续划分为多个 region,由设备树(DTS)决定哪些 region 生效
2.2 四类 region 类型
在 rk3506.dtsi 中预定义了4个region的属性模板:

典型实践:采用 "region0 传输数据 + region3 控制握手" 的划分。region0 为双向数据通路,双方的数据同步通过 region3 中的控制寄存器完成通知与应答。
2.3 硬件地址体系
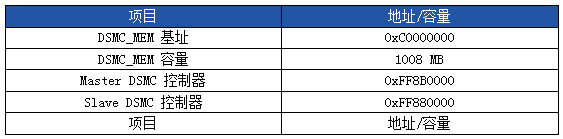
该地址空间为硬件固定映射,Host侧DSMC 窗口起始地址固定为 0xC0000000,软件仅能在既定地址范围内进行配置与访问。
FIFO 路径回压机制:RDYN 信号用于表征FIFO满/空状态,Master需根据该信号进行传输等待或恢复。FIFO路径受硬件流控约束,并非简单内存复制。
第三章:FIFO与Register 的协作机制
3.1 两类访问通路
Local Bus 主从交互可划分为两类:
· FIFO 访问:当 region属性为Merged FIFO或 No-MergeFIFO 时,Host 访问的是数据通路,数据经Slave侧FIFO后最终写入 Slave 内存。
· Register 访问:当 region 属性为Register 时,Host访问的是Slave CSR寄存器窗口,用于主从控制信息交互。
3.2 双向寄存器通知
Local Bus 提供两组寄存器,实现主从双向中断通知:

在 region3 中,Host 侧地址映射:

第四章:板级配置与 DTS 适配
4.1 硬件连接
RK3506开发板上,DSMC信号通过特定排针引出,Host与 Slave之间需要连接以下信号:
· 数据线:DSMC_DATA[7:0](8-bit 模式)或 DSMC_DATA[15:0](16-bit 模式)
· 控制线:CLK、CS、RDYN、DSMC_CMD等
· 中断线:用于主从中断通知
注意:两块板的GND 必须可靠连接。8-bit模式下,数据线只需连接DSMC_DATA[7:0];16-bit 模式需连接全部 16 根数据线。同一CS下的位宽必须统一。
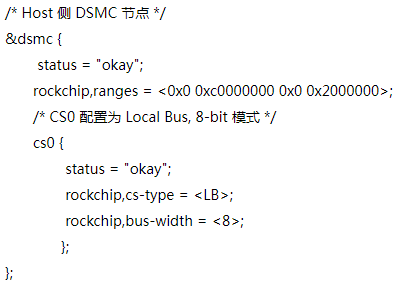
4.2 Host 侧 DTS 配置
4.3 Slave 侧 DTS 配置
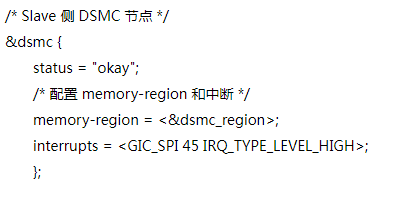
4.4 启动日志确认
正确配置后,启动时会在内核日志中看到以下关键信息:
DSMC: init cs0 LB device DSMC: cs0 byte dll delay line result 0x2d DSMC: clk_sys: Enabled, frequency: 196608000 Hz DSMC: CS0: LB device DSMC: CS0 virt: (ptrval), phys: 0xc0000000, size:0x2000000
第五章:用户态访问方式
5.1 设备节点
驱动加载后,会在 /dev/dsmc/ 下创建用户态访问节点:
/dev/dsmc/cs0/region0 # FIFO 数据窗口
/dev/dsmc/cs0/region3 # Register 控制窗口
5.2 FIFO 数据读写
通过 region0 进行数据读写的核心流程:
int fd = open("/dev/dsmc/cs0/region0", O_RDWR); /* 写入数据到 Slave 内存 */ write(fd, write_buf, write_size); /* 从 Slave 内存读取数据 */
read(fd, read_buf, read_size);
close(fd);
5.3 Register 控制交互
通过 mmap 映射 region3 后,以寄存器方式完成主从握手:
int reg_fd = open("/dev/dsmc/cs0/region3", O_RDWR);
volatile uint32_t *reg = mmap(NULL, 0x1000, PROT_READ | PROT_WRITE, MAP_SHARED | MAP_LOCKED, reg_fd, 0); /* Host 写 LBC_CON0,下发控制请求 */ reg[LBC_CON(0) / 4] = request_value; /* Host 读 APP_CON0,获取 Slave 应答 */
ack = reg[APP_CON(0) / 4];
munmap((void*)reg, 0x1000);
close(reg_fd);
关键细节:APP_CON0 偏移为 0x0000,LBC_CON0 偏移为 0x0100。由于 reg 按 uint32_t 访问,因此使用"寄存器偏移 / 4"作为数组下标。
第六章:性能实测
6.1 测试条件
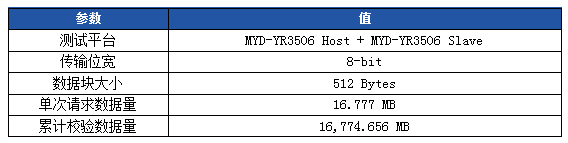
6.2 测试结果

结论:在 512B + 8-bit 参数组合下,链路能够支持长时间、大规模重复访问而不出现误码,平均写速率约 340 MB/s,平均读速率约 344 MB/s。
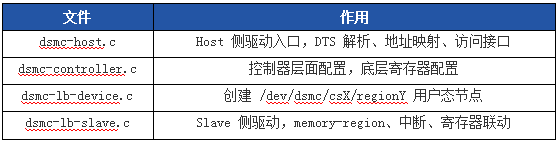
6.3 驱动核心文件
总结与展望
本文围绕RK3506核心板DSMC的Local Bus 应用进行了完整说明与验证,涵盖接口定义、空间模型、板级连接、驱动配置、用户态访问以及性能测试。
从测试结果来看,DSMC已能够同时支撑FIFO 数据面传输和Register 控制面交互。Host 可通过 /dev/dsmc/cs0/region0直接访问Slave侧落地内存,也可通过 region3 完成寄存器通知与控制握手,形成一条兼具数据访问与控制交互能力的跨芯片通信通道。
总体来看,DSMC 在RK3506核心板 Local Bus场景下已具备明确的工程应用价值,可为工业控制等场景中的低延迟控制交互和中高频数据交换提供可靠支撑。
参考资料:《Rockchip_Developer_Guide_DSMC_CN》

EtherCAT 总线凭借高速实时、拓扑灵活的优势成为运动控制领域的主流选择,而双路 EtherCAT 主站控制器更是能满足复杂产线的多场景分区控制需求

方案集成星闪SLE模组,10路UART与2路CAN FD,成本更低,含税单价仅98元
方案集成两个高级定时器,每个高级定时器可输出三路带死区的互补 PWM,实现单芯片驱动两路BLDC 或 PMSM
毫米波雷达人体感应模组通过智能算法可精准区分人体与其他运动物体(如宠物、窗帘摆动),大幅降低误报率。
RV1126B芯片内置专用的硬件拼接模块,依靠硬件完成图像融合,大幅降低CPU与内存资源占用,适配低功耗边缘视觉场景。



