发布时间:2026-05-12 阅读量:10496 来源: 发布人: suii
在现代工业自动化领域,设备实时协同已成为智能制造的关键命脉。EtherCAT 协议凭借其微秒级实时响应、精准分布式时钟同步与高度灵活的拓扑结构三大核心优势,成为高端运动控制领域的首选总线技术。
EtherCAT底层采用独特的“飞读”通信机制,数据帧在网内依次穿过每个从站,实现高带宽利用的同时保持极低的通信延迟。它能同时驾驭多个伺服电机,实现协同作业,广泛适用于自动化生产线、数控机床以及机器人技术等领域。
快包分析师推荐极海、先楫高性能MCU研发的EtherCAT伺服控制解决方案,方案源代码、原理图开源可交付,降低开发调试门槛,为工程师和设备终端商提供了高性价比的解决方案。如需了解方案详情,可联系客服。
400W EtherCAT总线型高压伺服控制器方案
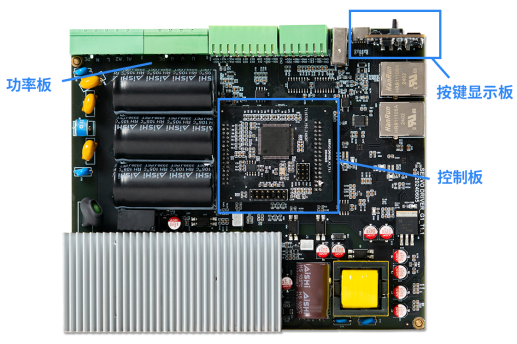
方案主控采用极海G32R501高性能实时控制MCU。基于Cortex-M52双核架构,主频250MHz,由CPU0处理位置环、速度环、I/O与协议,CPU1负责位置通信、电流环与PWM输出。支持上位机ModBus协议与EtherCAT总线协议,配套参数调试工具可灵活配置400余项伺服参数,有效满足多样化工业应用定制需求。
方案框图:
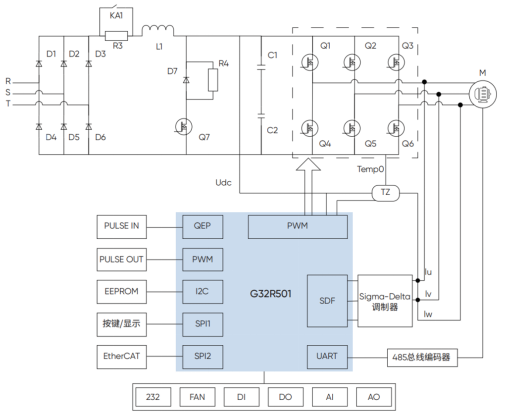
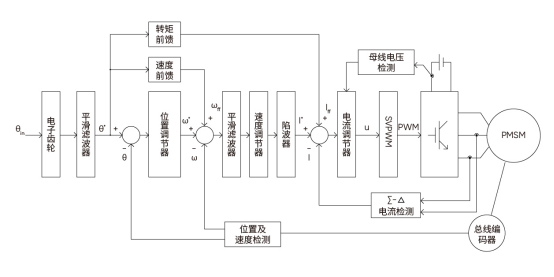
采用三环级联模式的软件设计:
• 位置环:给定来自外部脉冲、总线、I/O控制;位置反馈来自外部总线编码器;
• 速度环:给定来自位置环的输出,也接受来自外部模拟量或多段速的给定,一般速度环带宽不超过400Hz;速度反馈来自编码器位置解算;
• 电流环:给定来自速度环的输出,电流反馈由SDF模块采样获得,执行周期选为62.5μs。
方案特点:
• 输入电源范围:单相AC 200V~240V, -10%~+10%, 50/60Hz;
• 额定输出电流:3.0Arms,最大电流输出:9.0Arms;
• 速度范围:±7000rpm,支持弱磁算法;
• 转速精度:额定转速下可达1‰左右;
• 支持三环闭环控制和电机参数静态辨识,电机参数通过总线获取,PID参数与电机参数相关联,可适配不同电机;
• 支持EtherCAT总线功能,可通过主站进行位置控制;
• 多种控制模式:外部脉冲位置控制、JOG控制、全闭环位置控制、速度控制、力矩控制;
• 丰富报警代码:过压/欠压/过流/过载/过热/过速、主电源输入缺相、再生制动状态异常、位置偏差/制动率过大、编码器反馈错误、行程超限、EEPROM 错误等。
基于HPM6800的EtherCAT主站解决方案
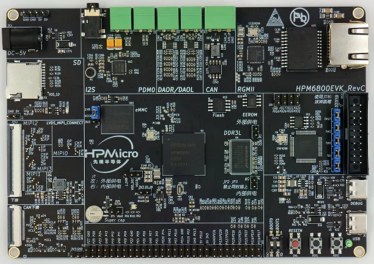
基于先楫HPM6800与开源CherryECAT主站协议栈,实现的高性能、轻量化EtherCAT主站解决方案。该方案在保持极低资源占用的同时,实现了优异的实时性与丰富的协议支持,为工业运动控制、实时IO等场景提供高性价比的EtherCAT主站实现路径。
方案特性:
1.极致的资源优化RAM占用:
• 约 4 KB
• Flash占用:约 40 KB(含24KB主站代码 + 16KB Shell命令及日志)
• 适合资源紧张的嵌入式场景,降低硬件成本。
2.高效的传输机制异步队列传输:
• 单次传输可携带多个EtherCAT Datagram,提升总线利用率。
• 零拷贝技术:直接使用ENET收发缓冲区进行协议数据填充与解析,减少内存复制开销,提升实时性。
3.完善的协议与功能
• 支持拓扑自动发现:支持热插拔,自动扫描总线并更新从站拓扑与信息。
• 从站状态自动监控:实时监测从站运行状态。
• 分布式时钟(DC):支持时钟同步,为高精度协同控制提供基础。
• 多种通信服务:CANopen over EtherCAT (CoE)、File over EtherCAT (FoE)、Ethernet over EtherCAT (EoE)
下图为HPM6800EVK(运行于Flash XIP模式)实测的DC同步抖动表现,稳定维持在3µs以内:
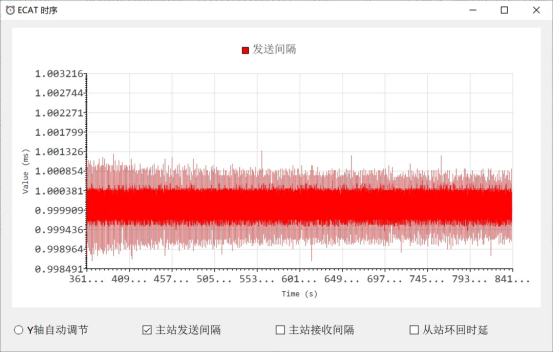
方案核心优势:
• 轻量高效:在极小的内存与存储空间内实现全功能EtherCAT主站。
• 实时性强:凭借零拷贝、队列传输等优化,实现微秒级循环周期与低抖动。
• 稳定可靠:支持热插拔、状态监控与丰富的诊断功能,符合工业应用需求。
• 易于集成:基于开源CherryECAT栈,配套命令行交互工具(参考IgH),便于开发调试与二次集成。
应用场景:
适用于工业机器人运动控制器、数控系统(CNC)、包装机械、印刷设备以及其他对实时性、同步性要求高的多轴协同控制领域等场景。
如需了解方案详情,可联系客服。

EtherCAT 总线凭借高速实时、拓扑灵活的优势成为运动控制领域的主流选择,而双路 EtherCAT 主站控制器更是能满足复杂产线的多场景分区控制需求

方案集成星闪SLE模组,10路UART与2路CAN FD,成本更低,含税单价仅98元
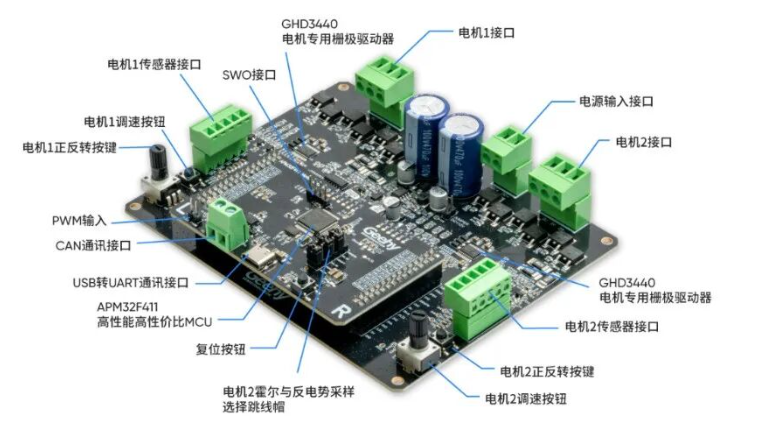
方案集成两个高级定时器,每个高级定时器可输出三路带死区的互补 PWM,实现单芯片驱动两路BLDC 或 PMSM
毫米波雷达人体感应模组通过智能算法可精准区分人体与其他运动物体(如宠物、窗帘摆动),大幅降低误报率。
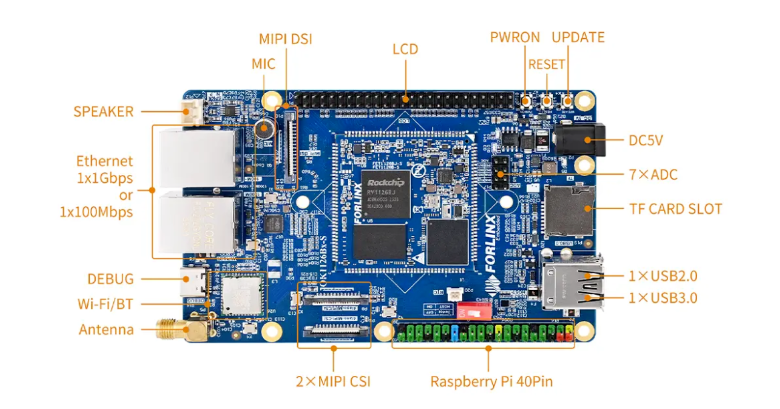
RV1126B芯片内置专用的硬件拼接模块,依靠硬件完成图像融合,大幅降低CPU与内存资源占用,适配低功耗边缘视觉场景。



