发布时间:2026-05-26 阅读量:11210 来源: 我爱方案网 作者: suii
在机器人高频震动、紧凑空间和多关节同步场景下,通信延迟、抖动和可靠性直接影响了系统性能。目前市场主流的机器人关节模组通信方案包括EtherCAT、CAN/CAN-FD、SPI/UART、I2C、RS485等几种。
其中EtherCAT的通信实时性高达微妙级别且抗干扰能力强,成为机器人高精度运动控制的首选方案。EtherCAT基于标准以太网帧,通过”飞读飞写”机制让每个从站在同一帧经过时完成数据交换,网络延迟低至微秒级,分布式时钟(DC)同步精度可达亚微秒。
快包分析师推荐先楫HPM6E8Y、HPM5E3Y和极海APM32F425三款高性能MCU研发的机器人关节伺服方案,芯片内置EtherCAT控制器和PHY,兼具高算力、高集成度、实时通信等优势,支持配套调试工具,降低开发调试门槛。如需了解详情可联系客服。
先楫HPM6E8Y机器人关节伺服demo

方案基于先楫HPM6E8Y芯片运行,支持CiA402(CSV,CSP)协议与FOE(OTA)功能,内置S曲线加减速算法。具备过流,过压,欠压,过温,飞车,编码器断线等保护功能。支持hpm_monitor_studio配套调试工具,可供客户快速二次开发。
方案特点:
• 具备过流,过压,欠压,过温,飞车,编码器断线等保护功能
• 开发支持:提供基于BSD许可证的SDK,集成FreeRTOS、RT-Thread等实时操作系统,支持MATLAB/Simulink自动代码生成。
• 安全认证:芯片集成 AES-128/256, SHA-1/256 加速引擎和硬件密钥管理器,支持固件软件签名认证和加密启动,实时代码加密执行。
HPM6E8Y芯片优势:
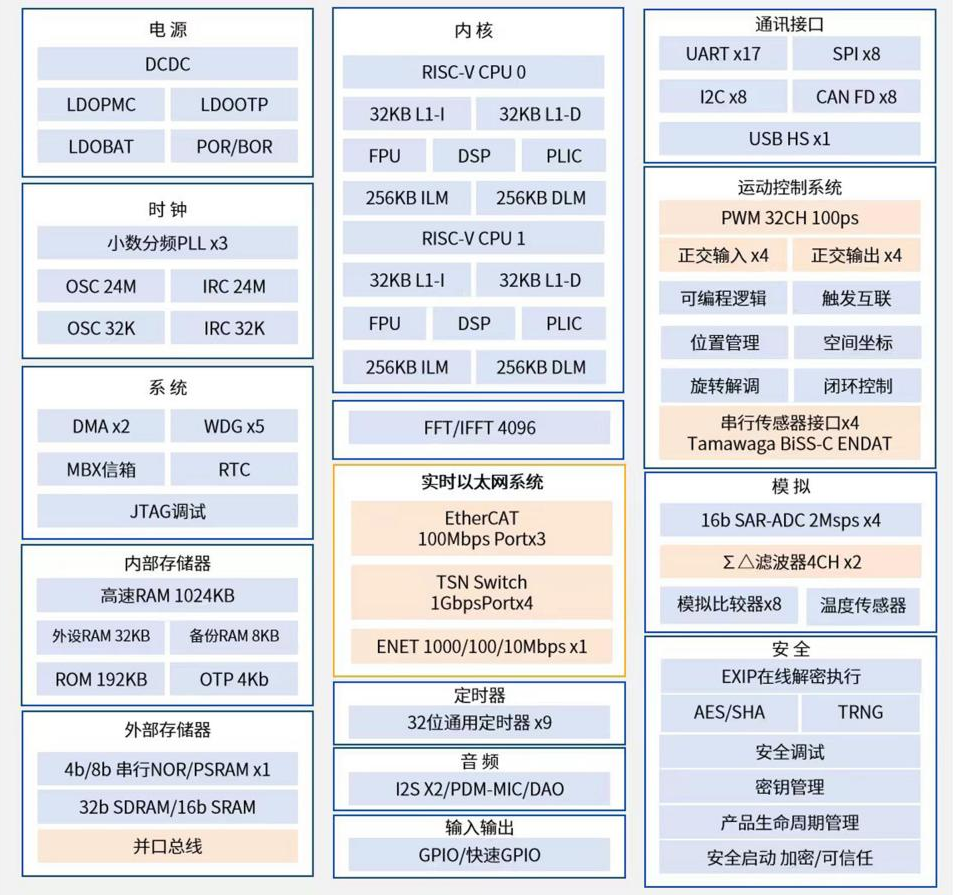
先楫HPM6E8Y主频超600MHz,内置RISC-V双核,集成2个PHY,不仅支持EtherCAT从控制器(ESC: EtherCAT Slave Controller),还支持多达3个外部端口的时间敏感网络(TSN: Time Sensitive Networking)千兆以太网交换机,同时拥有32通道高分辨率PWM输出及∑∆数字滤波器,为高精度运动控制系统量身打造出色的硬件平台。
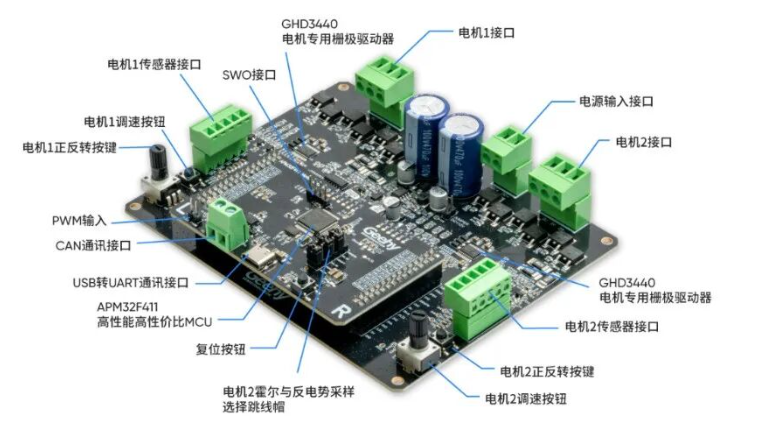
极海APM32F425机器人智能关节伺服
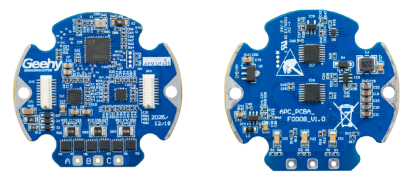
方案采用极海APM32F425工业级高性能MCU搭配GHD3440电机栅极驱动器,依托单芯片全集成主控架构与专用功率驱动协同发力,构建从控制运算、信号处理、驱动放大到功率输出的完整闭环链路。
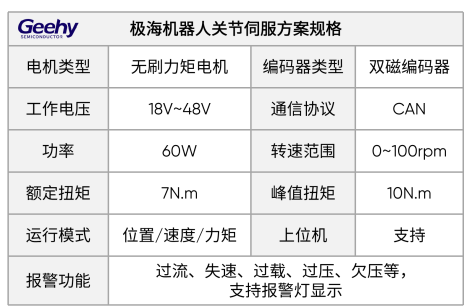
方案参数:
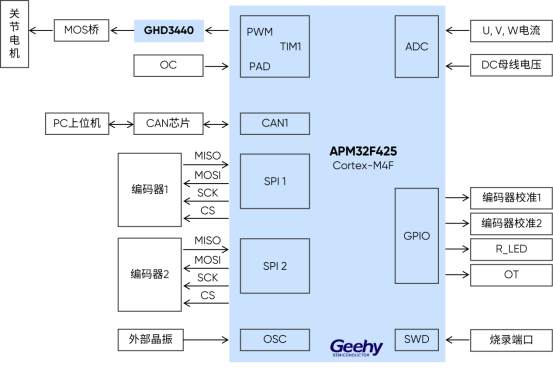
方案框图:
方案优势:
• 采用通用伺服设计架构,支持位置、速度、力矩等控制模式;内置双磁编码器及校准算法,有效消除位置检测误差,优化系统运行稳定性。
• 采用APM32F425主控芯片(主频240MHz,20-24μs中断响应)高算力,可大幅提升电流环控制频率;GHD3440匹配主控PWM输出信号,显著缩短系统响应时间。
• 支持1Mbps的CAN通讯,轻松实现多台设备组网运行,兼容多数关节伺服的通信需求。
• 支持PC上位机调试,可执行参数修改与保存,三环PID调试,JOG试运行,示波器等功能,有助于工程师快速上手、高效开发。
• 具备压、欠压、过流、过热、过载、超速、位置偏差、编码器错误等全维度保护功能,有效规避工况风险。
• 采用小型化封装,大幅减少外围元器件数量,适配小尺寸PCB布局需求,契合一体化关节伺服模组的紧凑型、轻量化设计需求。
基于先楫HPM5E3Y的关节伺服解决方案
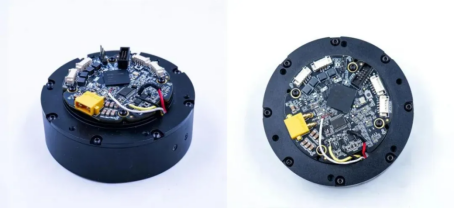
方案采用以RISC-V架构的HPM5E3Y单芯片集成EtherCAT通信与实时控制。该方案将高性能MCU芯片与电机驱动电路、编码器、减速器高度集成,体积更小、集成度更高,可灵活适配协作机器人的紧凑关节设计,降低整机身重量。同时,提供开源的软硬件设计文档资料,支持用户基于芯片自定义控制算法,兼容多场景二次开发。
方案参数:
• 输入电压:24VDC
• 额定功率:62W
• 电流环频率:16KHz
• 速度环:2KHz
• 通讯方式:EtherCAT,CAN,RS485
• 适配电机:最大电流13A/扭矩12Nm
如需了解详情可联系客服。

EtherCAT 总线凭借高速实时、拓扑灵活的优势成为运动控制领域的主流选择,而双路 EtherCAT 主站控制器更是能满足复杂产线的多场景分区控制需求

方案集成星闪SLE模组,10路UART与2路CAN FD,成本更低,含税单价仅98元
方案集成两个高级定时器,每个高级定时器可输出三路带死区的互补 PWM,实现单芯片驱动两路BLDC 或 PMSM
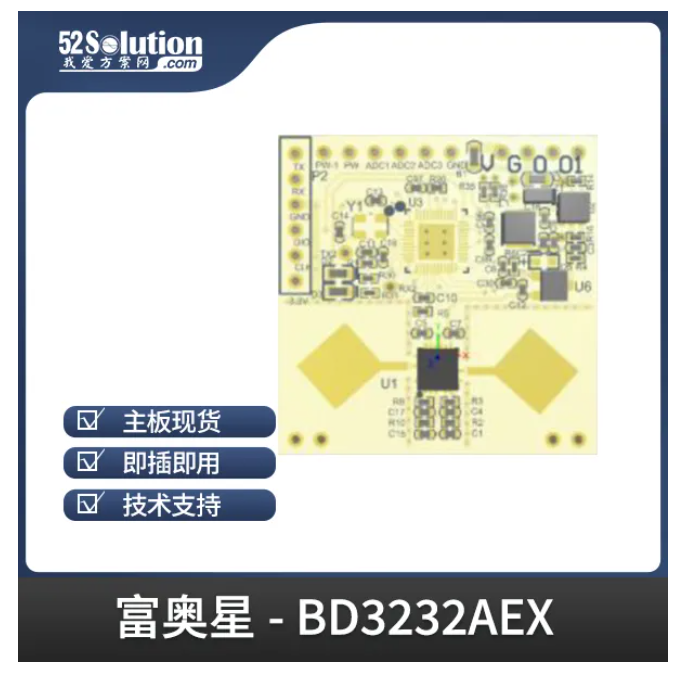
毫米波雷达人体感应模组通过智能算法可精准区分人体与其他运动物体(如宠物、窗帘摆动),大幅降低误报率。
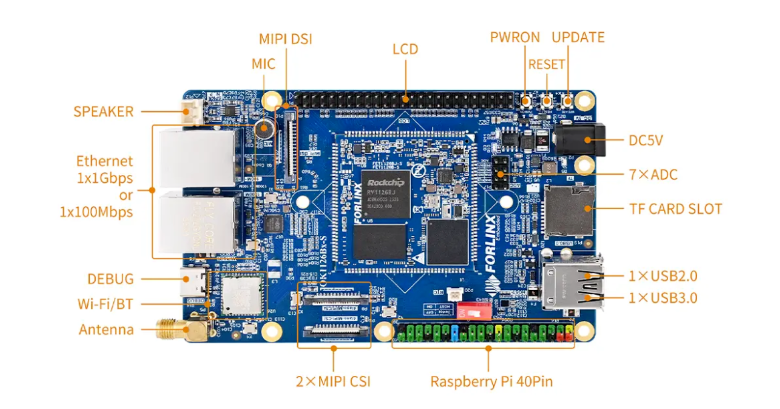
RV1126B芯片内置专用的硬件拼接模块,依靠硬件完成图像融合,大幅降低CPU与内存资源占用,适配低功耗边缘视觉场景。



