发布时间:2026-05-28 阅读量:14394 来源: 发布人: suii
前言:从"通用"到"硬实时"的那堵墙
在工业自动化现场,我们时常听到这样的抱怨:"明明 Linux 上跑个 EtherCAT 主站协议栈很简单,可一到多轴联动、精密组装这类场景,周期一不小心就'飘'了,轨迹抖得让人心慌。" 问题就出在"硬实时"三个字上。要在通用操作系统上实现微秒级的确定性与低抖动,一直是机器人、多轴运动控制、半导体设备等高精度场景落地的关键挑战。
开源界的明星——IgH EtherCAT Master 协议栈,凭借其精悍的内核级架构和 DC(分布式时钟)同步能力,已成为连接 EtherCAT 从站与上层应用的核心桥梁。然而,要让这颗明珠绽放全部光芒,Preempt-RT 实时内核的加持以及底层硬件的精准配合缺一不可。
今天,我们基于 MYD-LR3576 开发板——搭载瑞芯微 RK3576 高性能处理器,通过 1 ms 周期同步速度模式与 125 μs 周期同步位置模式的实测对比,为您揭示:在 CPU 隔离核与满负载压力下,如何将通讯抖动控制在亚微秒到微秒级范围,并奉上一套可直接落地的工业级实时控制方案。
第一章:IgH EtherCAT Master——开源协议栈的"硬核心脏"
对于初学者朋友,您可以简单地把 EtherCAT 理解为一种"工业现场的快递网络"——主站是调度中心,从站是各个执行节点,数据报文像一列永不停止的高速列车,把所有节点的信息一站收集、一站下发。IgH EtherCAT Master 就是那个极度守时的调度中心,它运行在 Linux 内核空间,直接从驱动层收发报文,避免了用户态调度带来的不确定性。
在专业工程师眼里,IgH 的优点很直白:支持分布时钟(DC)、内核级主站与通用以太网驱动深度结合、丰富的命令行与 API。它的抖动水平,直接反映了整个实时系统的品质。而我们要做的,就是让这调度中心的"心跳"在这个平台上,达到高精度的规整。
第二章:实战项目——当 RK3576 遇上微秒级 EtherCAT 周期
2.1 项目配置一览
开发环境与硬件
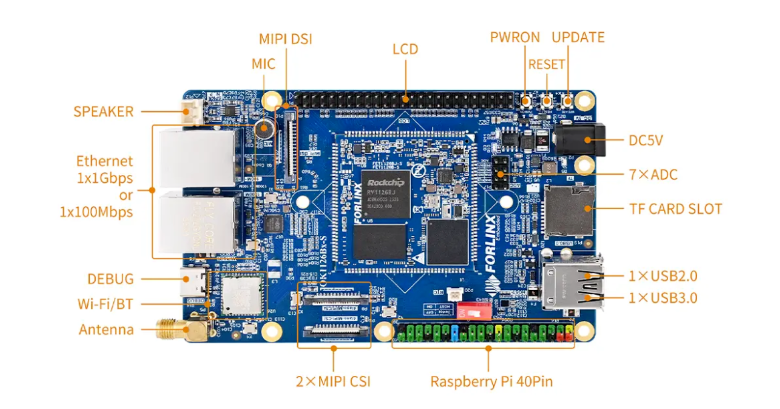
· 核心板:米尔 MYD-LR3576(RK3576,4×Cortex-A72 + 4×Cortex-A53,双千兆网口)
· 操作系统:buildroot,内核 6.1.118 打上 Preempt-RT 补丁
· EtherCAT 主站:IgH EtherCAT Master 1.6.0
· 伺服与电机:4 台支持 EtherCAT 的 SV630N 伺服驱动器,搭配汇川 MS1H4 电机
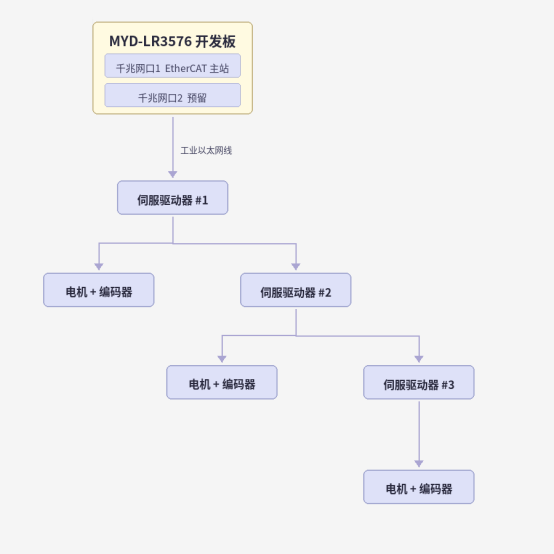
图2:硬件连接逻辑 – 双千兆网口之一作为 EtherCAT 主站,下挂多台伺服
2.1.1 测试方法与统计口径
为了确保测试数据的可复现性和可信度,本节说明测试方法与统计口径:
· 抖动定义:本文中的周期抖动指实际周期时长相对目标周期的偏差(实际周期 − 目标周期),正负值分别表示周期超调和滞后。
· 统计方式:最大值、最小值、平均值基于原始采样数据直接计算,未剔除启动阶段数据,反映全周期真实表现。
· 测试时长:空载和压力测试每组连续运行 30 分钟以上,长时间拷机连续运行 12 小时。
· 测试负载:空载测试仅保留串口输出,关闭图形界面、SSH 服务和其他后台任务。压力测试通过 stress-ng 对非隔离核(0-6)施加 CPU 满载、内存读写和 IO 压力,同时用 hackbench 制造调度延迟。
· 从站配置:4 台 SV630N 伺服驱动器,每台配置标准 PDO 映射(控制字、状态字、目标位置/速度、实际位置/速度),DC 同步模式以第一个支持 DC 的从站为参考时钟。
· 测量方法:通过主站内部高精度时间戳记录每个周期起点,相邻周期起点的时间差即为实际周期时长。
2.2 空载测试:亚微秒级的精准心跳
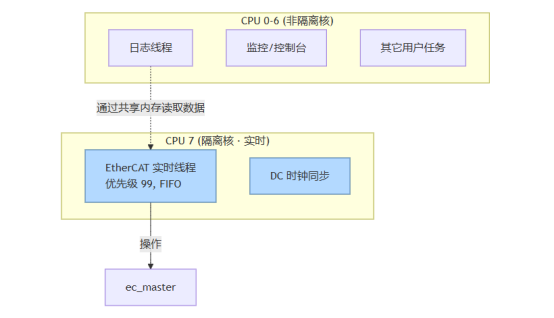
我们把 EtherCAT 主站配置为 1 ms 周期同步速度模式,CPU 核 7 专供主站实时线程(isolcpus=7),内核锁内存、线程优先级提升至最高,系统除串口外无其他负载。连续运行半小时的周期抖动分布如下:

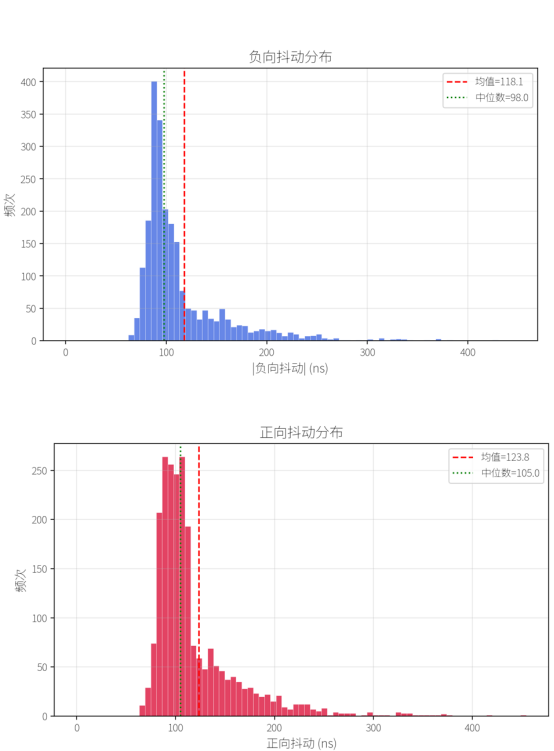
图3. ec_stmmac.ko 1000Hz 空载周期抖动分布(最大 922ns,平均 22ns)
切换到更极限的 125 μs 周期同步位置模式(即每秒 8000 帧),电机在执行连续微步定位。得益于 DC 同步与驱动层精确时间标记,实测抖动依然控制在较低水平:
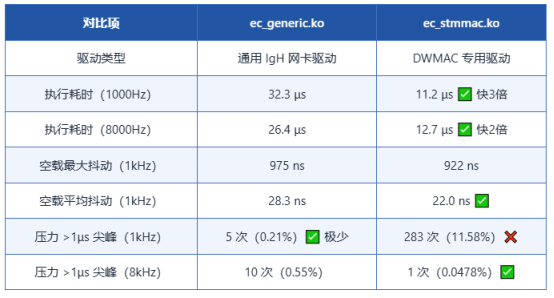
· 125 μs 空载(ec_stmmac.ko):最大周期抖动 922 ns,平均抖动 22 ns,执行耗时 12.7 μs
· 125 μs 空载(ec_generic.ko):极端抖动 ±11.7 μs,平均抖动 21.1 ns,执行耗时 26.4 μs,>1μs 尖峰仅 1 次(0.054%)
对于习惯 μs甚至ms级别抖动的传统方案而言,看到抖动进入亚微秒,意味着毫秒级的轨迹规划将拥有极干净的底层时钟基准,电机噪音更低,多轴同步更精准。
2.3 压力测试:加压验证系统繁忙时的实时表现
接下来我们测试压力模式下的设备实时情况。启动 stress-ng工具,对除隔离核以外的 0-6 核施加满负载压力(CPU 满载、内存轮番读写、文件系统疯狂 IO),同时用hackbench制造大量调度延迟。压力测试命令如下:

即使在这种高负载的环境下,我们隔离核上的 EtherCAT 主站实时线程依然保持稳定:

· 1 ms 压力测试(ec_stmmac.ko):最大周期抖动 1.63 μs,平均抖动 121 ns,>1μs 尖峰高达 283 次(11.58%)
· 1 ms 压力测试(ec_generic.ko):极端抖动 ±33.7 μs,平均抖动 36.0 ns,>1μs 尖峰仅 5 次(0.21%)
· 125 μs 压力测试(ec_stmmac.ko):最大周期抖动 1.30 μs,平均抖动 57 ns,>1μs 尖峰仅 1 次
· 125 μs 压力测试(ec_generic.ko):极端抖动 ±43.5 μs,平均抖动 26.3 ns,>1μs 尖峰 10 次(0.55%)
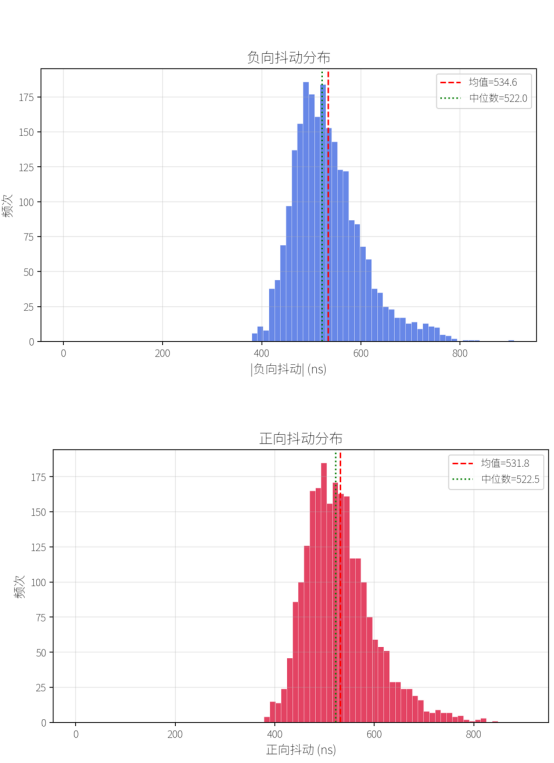
图4. ec_stmmac.ko 8000Hz 压力测试抖动分布(最大 1.30μs,平均 57ns)
ec_generic.ko 对比:相比之下,ec_generic.ko(通用驱动)在同等压力条件下虽然 >1μs 尖峰极少(1000Hz 仅 5 次),但极端抖动值可达 ±33.7 μs,说明其在高压场景下瞬时抖动幅度更大。而在 8000Hz 压力测试中,ec_generic 的极端抖动达到 ±43.5 μs,>1μs 尖峰 10 次,ec_stmmac 则仅有 1 次超过 1 μs 且极值控制在 ±1.30 μs,高频率下优势明显。
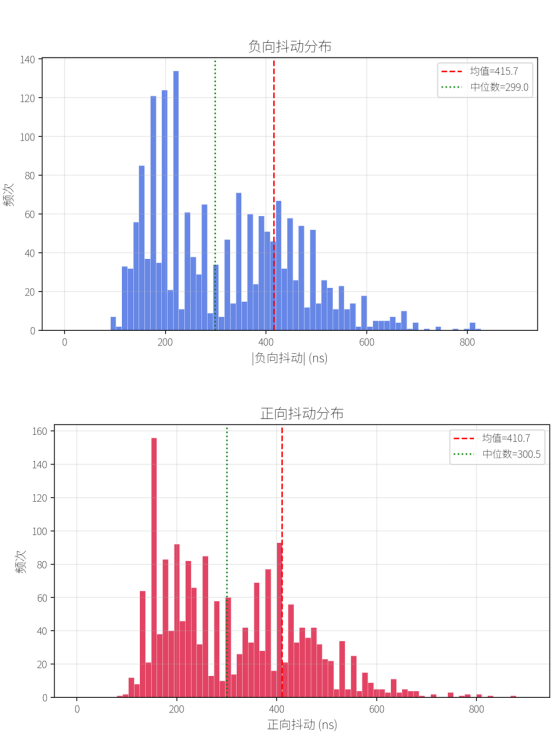
图5. ec_generic.ko 8000Hz 压力测试抖动分布(极端 ±43.5μs,>1μs 仅10次)
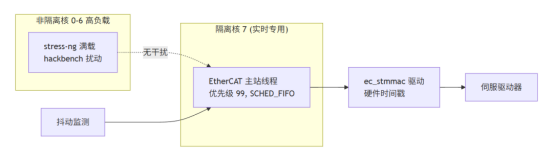
图6:满负载压力下的实时隔离示意 – 非隔离核满负荷,隔离核抖动仍保持在亚微秒级
2.4 长时间拷机:时间是最好的质检员
我们将 125 μs 周期位置模式连续运行 12 小时,确保车间日夜不关机场景下的可靠性。期间:
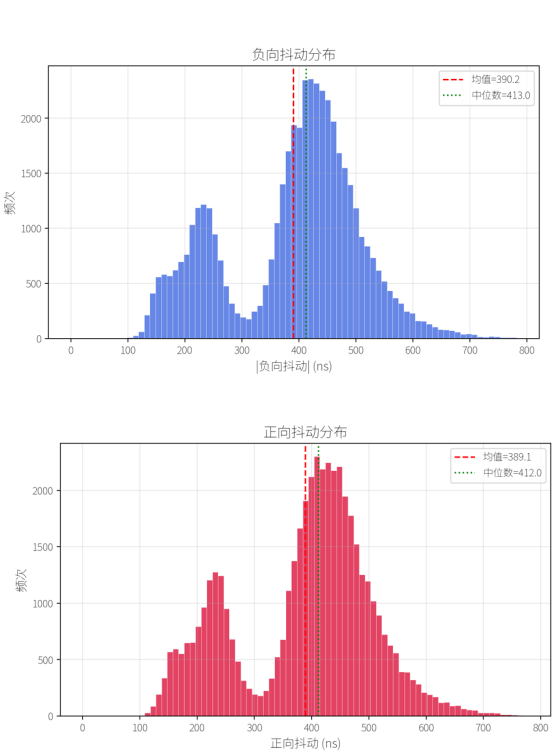
图7. ec_stmmac.ko 8000Hz 长时间运行抖动分布(47512 条记录,最大 1.25μs)
· 0 丢帧,主站状态机未发生一次 OP 到 SAFEOP 的异常跳变
· DC 时间漂移补偿稳定在 ±20 ns 以内
· 抖动统计与 1 小时测试高度吻合,无周期性尖峰或缓慢恶化现象
这证明整套方案不仅能跑,更可长期稳定运行,具备了从打样走向量产的底气。
这部分为专业工程师准备,拆解低抖动背后的技术骨架。
3.1 EtherCAT 驱动栈:专用驱动是关键
我们在 MYD-LR3576 上部署了 ec_stmmac.ko,这是专为 RK3576 的 STMMAC 千兆以太网控制器适配的实时驱动。EtherCAT 主站需要精确控制网卡的数据收发时机,标准 Linux 网卡驱动使用中断驱动模型,其响应时间受内核调度器影响,无法满足 EtherCAT 周期性通信(通常 1ms 甚至更短)的确定性要求。ec_stmmac.ko在原有通用 MAC 驱动基础上,针对 Preempt-RT 内核做了 NAPI 调度优化,并开启了硬件时间戳(HW Timestamp),确保报文收发流程中的时间标记和中断处理延迟降至最低。
相比之下,ec_generic.ko 作为通用 IgH 网卡驱动,适用于大多数标准以太网控制器,兼容性好但执行效率较低(1000Hz 下耗时 32.3 μs,是 ec_stmmac 的近 3 倍),且极端抖动幅度更大。
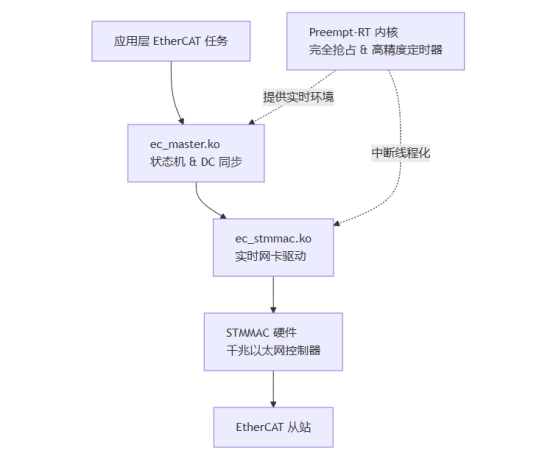
图8:IgH 驱动栈与 Preempt-RT 内核的关系
3.2 内核:Preempt-RT + 精调配置
3.3 应用层代码的"护身符"
在应用程序启动时,我们做了四件事确保实时线程不被打扰:
基于 RK3576 的出色算力(内置 6 TOPS NPU)和双千兆以太网,这套 EtherCAT 主站方案不仅能满足 32 轴甚至更多轴的微秒级同步控制,还可无缝融入边缘 AI 推理。想象一下,同一块板子上,隔离核驱动 125 μs 高精度运动控制,其余核运行视觉抓拍与缺陷检测,这种"运动+视觉"实时一体化架构,将彻底简化产线控制器设计,为柔性制造、协作机器人等领域带来质的飞跃。
最后,分享几点实操经验,帮您少走弯路:
驱动对比分析与选型建议
本文同时对 ec_generic.ko(通用 IgH 驱动)和 ec_stmmac.ko(DWMAC 专用驱动)进行了全面的周期抖动对比测试,关键对比数据如下:
选型场景推荐
推荐使用 ec_generic.ko 的场景:
推荐使用 ec_stmmac.ko 的场景:
基于 MYD-LR3576 的 RK3576 平台,结合 Linux Preempt-RT 实时内核和 IgH EtherCAT Master,可构建具备工业实时控制能力的 EtherCAT 主站方案。在本测试条件下,该方案能够稳定运行 1 ms 和 125 μs 控制周期,并在长时间测试中保持主站状态稳定。
其中,ec_stmmac.ko 专用驱动在执行耗时和高频周期场景下优势更明显,适合对 8000 Hz 等高控制周期有要求的应用;ec_generic.ko 通用驱动兼容性更好,适合快速验证和通用网卡场景。实际项目中应结合周期频率、极端抖动容忍度和开发维护成本进行选型。

EtherCAT 总线凭借高速实时、拓扑灵活的优势成为运动控制领域的主流选择,而双路 EtherCAT 主站控制器更是能满足复杂产线的多场景分区控制需求

方案集成星闪SLE模组,10路UART与2路CAN FD,成本更低,含税单价仅98元
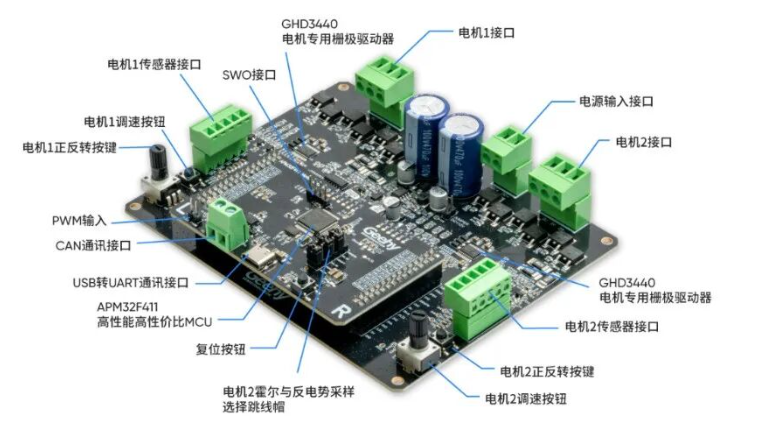
方案集成两个高级定时器,每个高级定时器可输出三路带死区的互补 PWM,实现单芯片驱动两路BLDC 或 PMSM
毫米波雷达人体感应模组通过智能算法可精准区分人体与其他运动物体(如宠物、窗帘摆动),大幅降低误报率。
RV1126B芯片内置专用的硬件拼接模块,依靠硬件完成图像融合,大幅降低CPU与内存资源占用,适配低功耗边缘视觉场景。



