发布时间:2026-06-2 阅读量:10686 来源: 米尔 发布人: bebop
人形机器人正从实验室走向工业与服务场景,传统控制器面临三大核心痛点:算力不足导致响应延迟,单核MCU难以支撑复杂运动学计算与多传感器融合;控制架构单一,单控制器故障即整机瘫痪,缺乏算力冗余;通信协议兼容性差,CAN/485、EtherCAT等多总线并存,集成周期长、成本高。

新一代人形机器人提出明确需求:双主站控制架构打造算力冗余,以1ms全局控制周期确保动作实时精准;支持单控制器联动双臂、头部、腰部等多部位协同,自由切换同步、异步、镜像等运动模式,工业分拣装配与服务柔性交互都能稳定适配。
基于RK3576核心板的技术方案
基于RK3576核心板构建高性能机器人运动控制平台,从算力、通信、实时性三个维度满足人形机器人需求。RK3576八核算力支撑复杂运算,采用4×A72@2.2GHz + 4×A53@1.8GHz高性能处理器,配备独立NPU,可并行处理多轴运动学解算、轨迹规划与视觉识别,算力较传统控制器提升5倍以上,为1ms控制周期提供保障。
关键技术:多总线融合通信。
CAN/485通信: 与CAN总线类型伺服电机、机械手建立稳定数据链路,兼容主流驱动器;
EtherCAT双主站: 4路百兆以太网中,原生以太网(YT8522)的两路作为EtherCAT主站,控制运动关节,实现纳秒级同步精度;
冗余链路:1路PCIe转百兆、1路USB转百兆作为备份,网络故障时毫秒级切换;
IO扩展:4路输出、4路输入IO,对接限位开关、急停按钮等现场设备;
实时性能:1ms闭环控制。 配合实时Linux(PREEMPT_RT)与EtherCAT主站栈,从传感器采集、运动学解算到伺服输出全链路控制在1ms内完成,动作连贯无抖动。
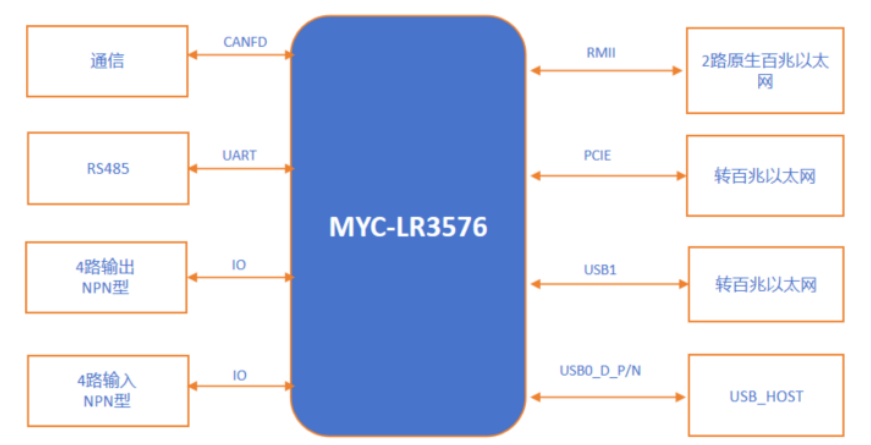
图:基于RK3576核心板的人形机器人系统框图
方案优势
双主站冗余,高可靠。 双RK3576构建主从架构,主站故障从站无缝接管,系统可靠性提升99.9%。
1ms控制周期,极致实时。 八核处理器+优化内核,控制周期压缩至1ms,满足高速装配与精密分拣需求。
多部位协同,运动灵活。 单控制器联动双臂、头部、腰部等多自由度,支持同步/异步/镜像模式自由切换。
异构协议统一,集成高效。 CAN/485与EtherCAT多总线融合,兼容主流伺服电机与传感器,集成调试周期缩短40%。
赋能
深入客户研发全流程,提供从方案到落地的全方位支持:
解决CAN稳定性问题: 针对CAN频繁open→close导致驱动挂掉的问题,深度调试定位内核资源管理机制,提供补丁彻底修复,保障现场长期可靠运行;
协助原理图评审: 基于多年嵌入式开发经验,对客户底板原理图进行专业评审,提前发现电源纹波、信号完整性、EMC等潜在风险;;
调试外设驱动: 完成USB、串口、网口、USB转网口、PCIe转网口等全部外设驱动的适配与验证,客户可直接复用;
全生命周期支持: 从方案设计、硬件开发、系统集成到量产维护,提供持续技术服务,帮助客户加速产品上市。
附:MYC-LR3576核心板
RK3576核心板搭载瑞芯微八核处理器,6TOPS AI算力赋能工业智能化
AI边缘应用:搭载6 TOPS的NPU加速器,3D GPU;
多种外设:双千兆以太网、PCIE2.1、USB3.2、SATA3、DSMC/Flexbus、CANFD、UART等;
8K@30fps/4K@120fps 解码(H.265、VP9、AVS2、AV1),4K@60fps编码(H.265、H.264);
多种多媒体接口HDMI/eDP/DP/MIPI-DSI/Parallel RGB/MIPI CSI/16M Pixel ISP;
LGA381 PIN、商业级:0℃ ~ +70℃、工业级:-40℃~+85℃;
适用于工业、AIoT、边缘计算、智能移动终端以及其他多种数字多媒体等场景。

EtherCAT 总线凭借高速实时、拓扑灵活的优势成为运动控制领域的主流选择,而双路 EtherCAT 主站控制器更是能满足复杂产线的多场景分区控制需求

方案集成星闪SLE模组,10路UART与2路CAN FD,成本更低,含税单价仅98元
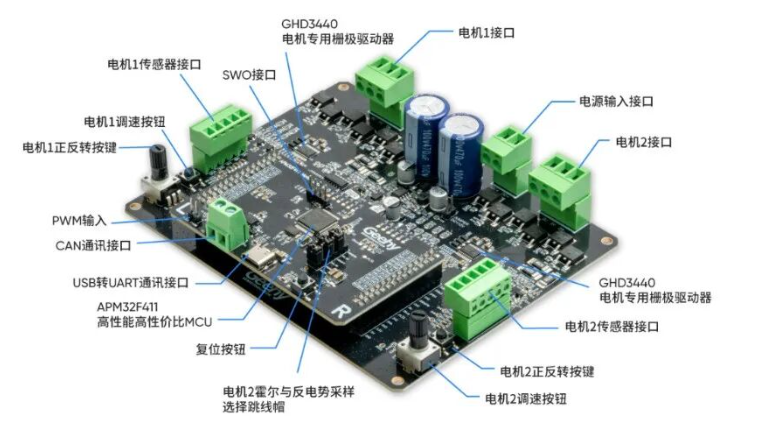
方案集成两个高级定时器,每个高级定时器可输出三路带死区的互补 PWM,实现单芯片驱动两路BLDC 或 PMSM
毫米波雷达人体感应模组通过智能算法可精准区分人体与其他运动物体(如宠物、窗帘摆动),大幅降低误报率。
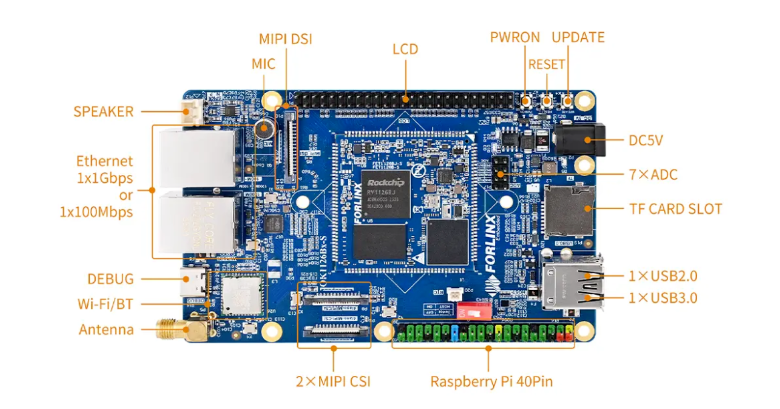
RV1126B芯片内置专用的硬件拼接模块,依靠硬件完成图像融合,大幅降低CPU与内存资源占用,适配低功耗边缘视觉场景。



