电子方案开发供应链平台
移动端
方案网小程序
方案网手机端
加小编微信入群
找方案上我爱方案网!
国产高性能EtherCAT主站方案:32轴微秒级同步,融合边缘AI实现运动+视觉一体化
仅需98元,全志T153工业核心板上新,集成星闪SLE模组,开发资料开源可交付!
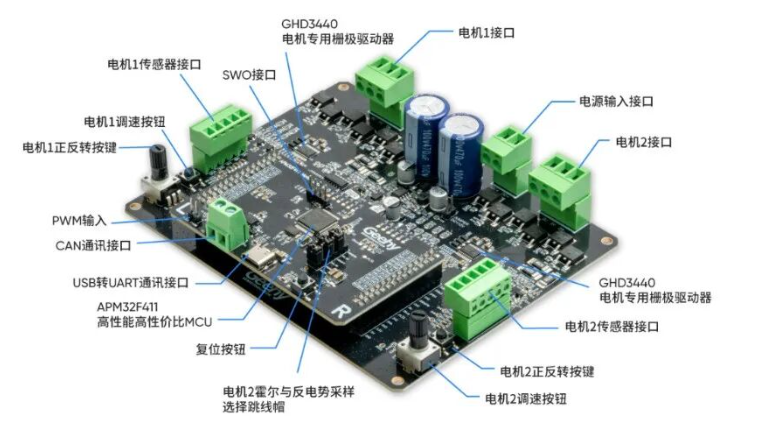
单芯片驱动双路电机+无感FOC算法,面向伺服、无人机及电动工具场景的BLDC电机驱动方案合集
2kW双向逆变器方案上新:峰值效率98.5%,THDu<3%,适用于储能及车载OBC场景!
金额:¥660.00
金额:¥700.00
金额:¥240.00
金额:¥1388.00
领域:消费电子
人气:170961
人气:167132
领域:智能家居
人气:175378
领域:安防监控
人气:169864
发布方案
联系客服
联系方式
联系方式:
400-085-2125
公众号
关注公众号随时随地发包接包,还能查看项目进度
回到顶部